
evolutiongts
Regular
About bloody time mate, I'm glad that you receieved the ASI BAC4000 in great shape. Please post vids!
evolutiongts said:Impressive, how is the throttle modulation and control? Top speed? What are you thoughts so far? Are you freewheeling or direct drive? What are you running for a display?
evolutiongts said:Are you running sensors or purely just sensorless?
evolutiongts said:Are you able to get smooth startup from a stop while running sensorless?
evolutiongts said:How does the VESC compare to the ASI BAC4000? What is the max voltage supported by the VESC?
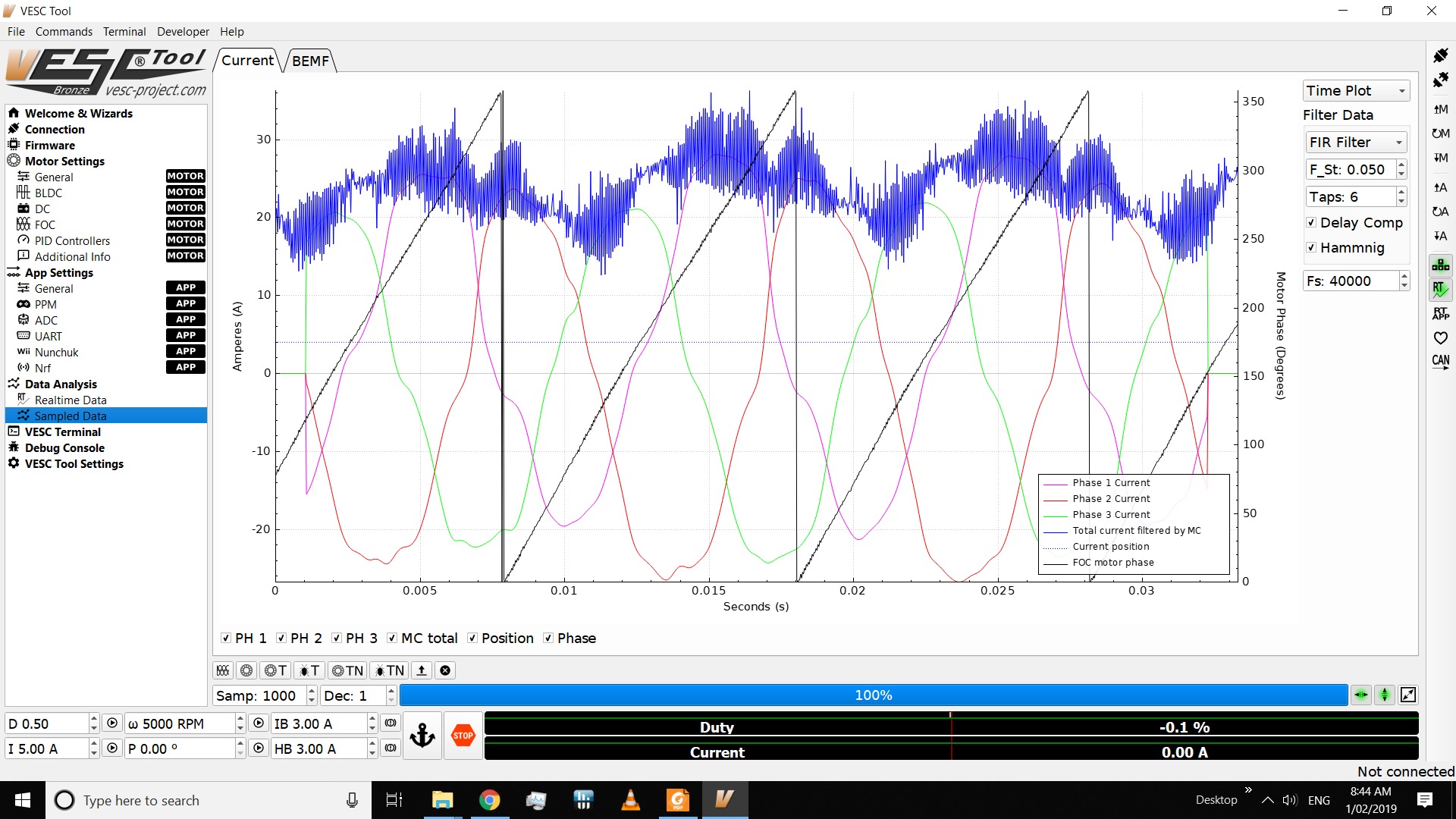
Wouldn't it be possible to program the VESC so that it always uses hall or resovler signal for tracking the rotor position?district9prawn said:The asi controller can push much higher phase currents. Not just because it is rated for more but also because it is less affected by the change in motor parameters as the stator begins to saturate. At higher currents this can cause the vesc to lose track of the rotor in sensorless mode.
madin88 said:Wouldn't it be possible to program the VESC so that it always uses hall or resovler signal for tracking the rotor position?
Hmm, i have asked Neumotor about maximum torque of the 8057 (or maximum current before it saturates), but i never got an answer.
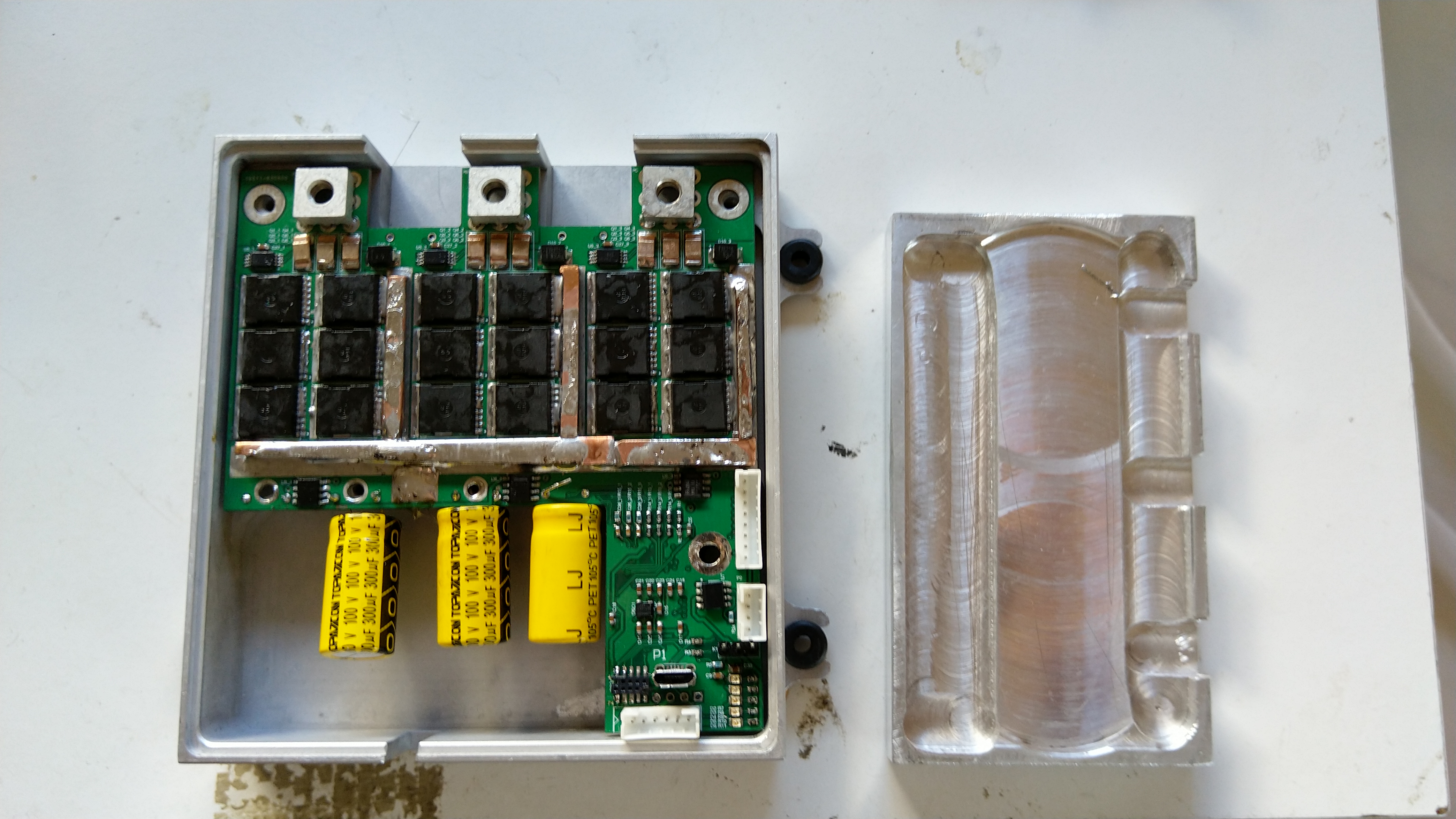
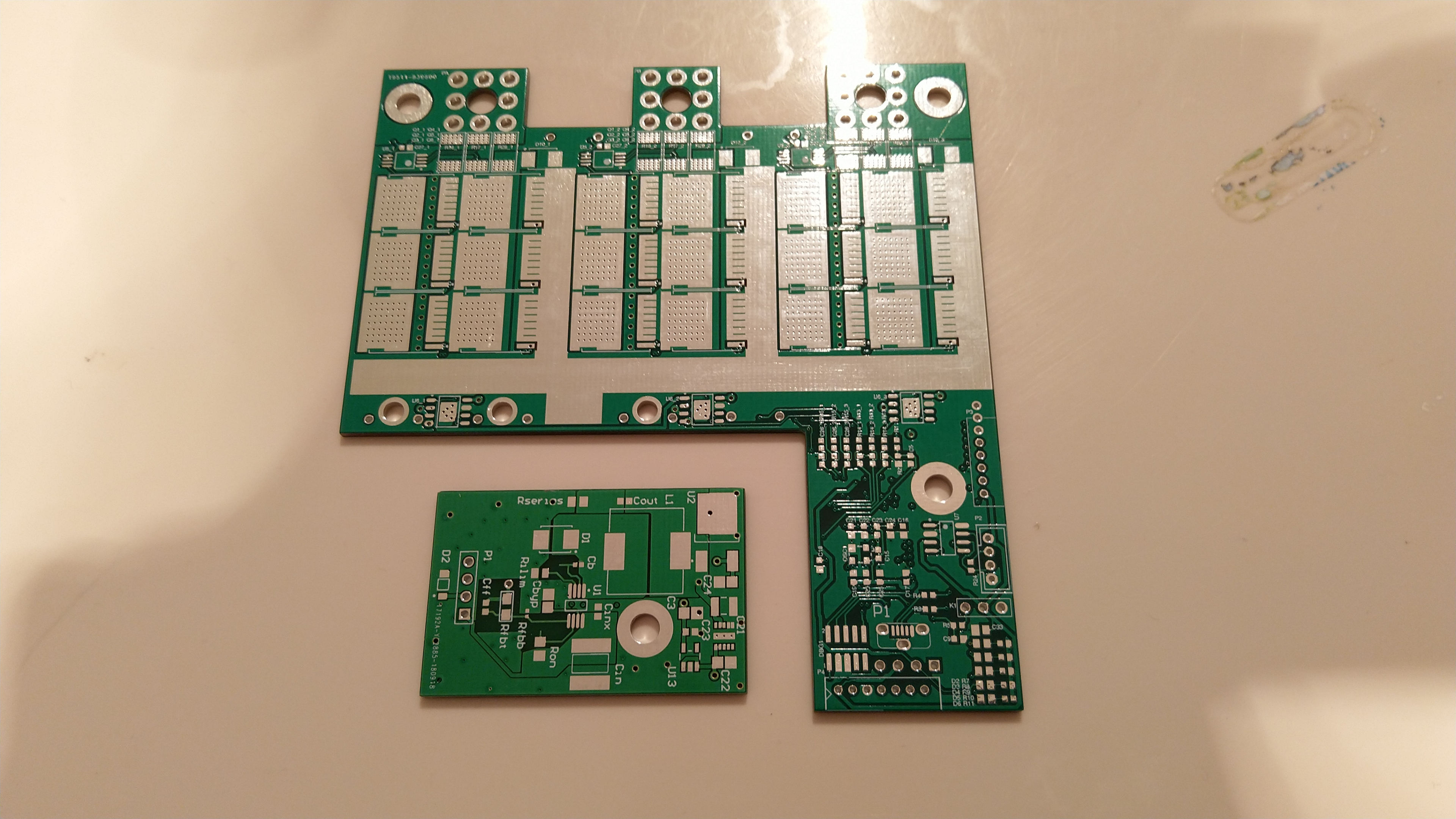
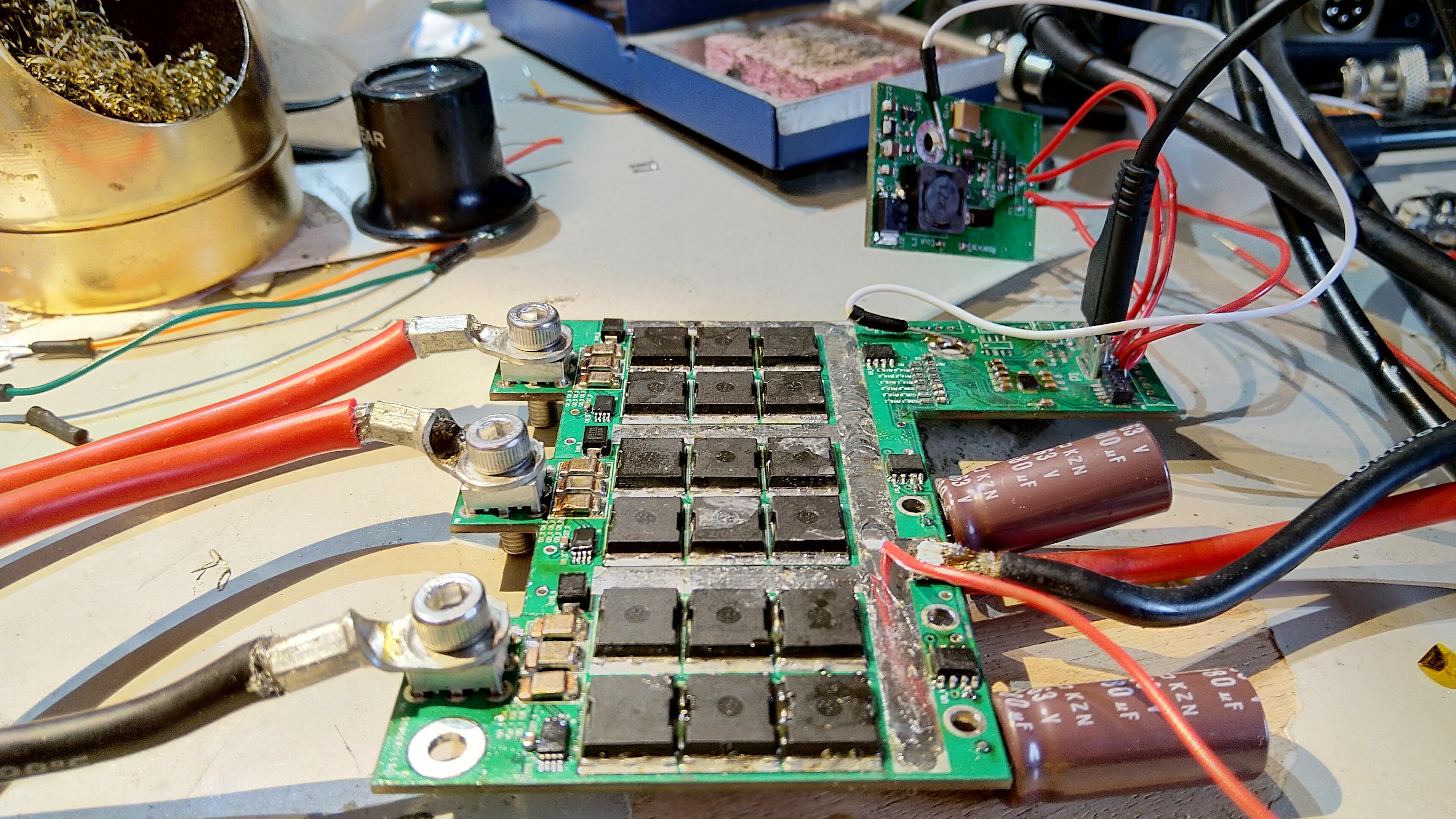
Does the controller need a given motor RPM or does it supply the 300A from a dead stop without loosing sync?district9prawn said:The v1.3 a200s board with the hsof-8 fets has been running well. Played around with the observer gains and rc filters on the current sense output. Now I can be as rough on the throttle as I want at 300A phase in sensorless. Everything is smooth with no faults.
Been trying to find a better way to handle low speed braking. Currently what the vesc does is modulate shorting windings when braking at very low speeds. At a crawl this works well but go a bit faster and the motor will cog. In regular current control mode the motor will also begin to cog as the low speed causes the controller to lose sync. So there is a erpm range where neither duty cycle mode or current control mode can brake smoothly.
On the bench I tried using position control mode to provide active braking at low speed with an encoder. Hopefully this translates well to actual riding.
madin88 said:Does the controller need a given motor RPM or does it supply the 300A from a dead stop without loosing sync?
madin88 said:Down to which speed does regen braking work?
