
Alien Drive Systems- Stunt scooter from scratch
- Thread starter beetbocks
- Start date






666yeti666
100 W
- Joined
- Jan 8, 2014
- Messages
- 183
any updates and perhaps a movie ... ???
regards
Sebastien
regards
Sebastien
I've been so busy- i have neglected the project and the updates..i am also having some building work done at home and my workshop is out of bounds...
I did however get a ride on it last week and OMG its fast- in fact its probably too fast for the size of it!!") the acceleration is awesome - as you can put the power down more than on a skateboard as you have handlebar to hold on to..
the acceleration is awesome - as you can put the power down more than on a skateboard as you have handlebar to hold on to..
There is loads of things i need to do to improve performance and handling but until i get my workshop back- i'm stuck really
There is one thing i would like some opinion on- whilst testing i used the wireless throttle i designed and made but the ESC didn't appear to receive a signal,so i assumed i'd damaged the PCB while re soldering etc,I then swapped it for one of one of my boards- and again no signal..so rather stupidly i tried a 3rd controller off another board,again no signal..i then used a Quanan transmitter/receiver i bought from hobby king..and it worked fine- I plugged the receivers back into the skateboards and no signal at all- the lights come to show there pairing , but no throttle..So it seems the ESC has blown the receivers ( all bloody 3 of them/!!)..yet worked fine with the hobbyking- anybody have any ideas why this may of happened? its very weird...
I did however get a ride on it last week and OMG its fast- in fact its probably too fast for the size of it!!
the acceleration is awesome - as you can put the power down more than on a skateboard as you have handlebar to hold on to..There is loads of things i need to do to improve performance and handling but until i get my workshop back- i'm stuck really
There is one thing i would like some opinion on- whilst testing i used the wireless throttle i designed and made but the ESC didn't appear to receive a signal,so i assumed i'd damaged the PCB while re soldering etc,I then swapped it for one of one of my boards- and again no signal..so rather stupidly i tried a 3rd controller off another board,again no signal..i then used a Quanan transmitter/receiver i bought from hobby king..and it worked fine- I plugged the receivers back into the skateboards and no signal at all- the lights come to show there pairing , but no throttle..So it seems the ESC has blown the receivers ( all bloody 3 of them/!!)..yet worked fine with the hobbyking- anybody have any ideas why this may of happened? its very weird...
666yeti666
100 W
- Joined
- Jan 8, 2014
- Messages
- 183
Did you already try to re-program your throttle neutral and end points in the esc ? If the ppm signal is out of the limits , the esc will go into failsafe and as result will keep the motor shutdown.
Regards
Sebastien
Regards
Sebastien
666yeti666
100 W
- Joined
- Jan 8, 2014
- Messages
- 183
oh bad luck, but mmmm ... strange when the rootcause is not clear ....
by the way; what was the reason that you didn't use a "dirt stunt scooter" which has thicker tires and thus a little more comfort ride ?
by the way; what was the reason that you didn't use a "dirt stunt scooter" which has thicker tires and thus a little more comfort ride ?
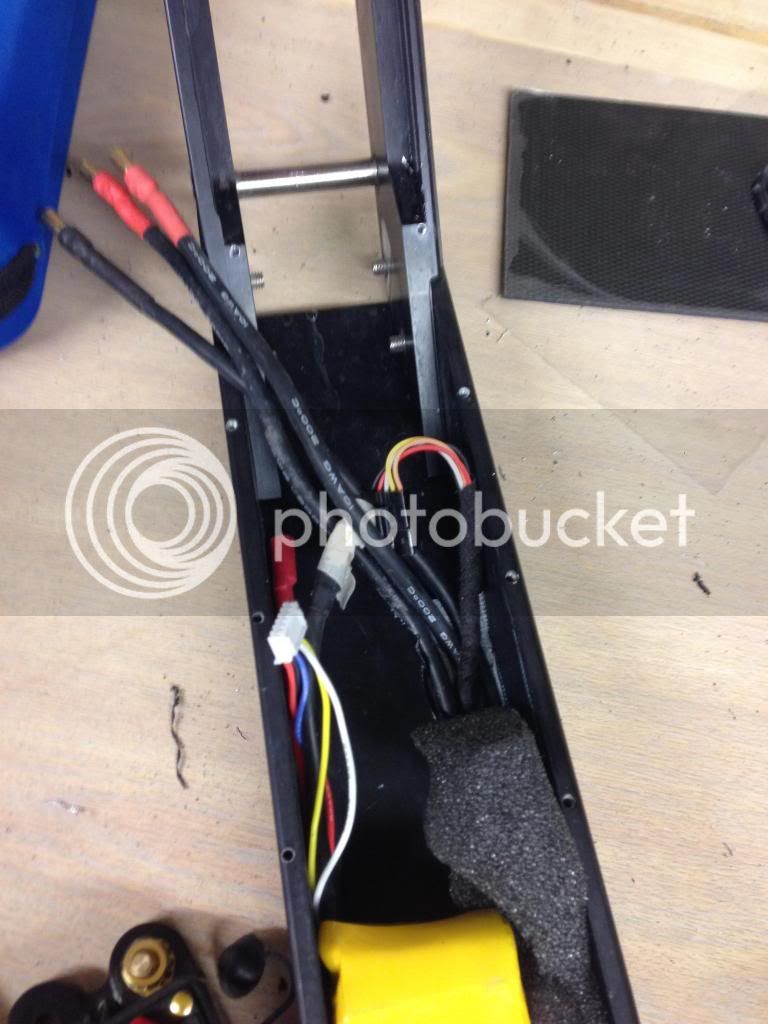
a few pics of the scooter- as I'm having some building work done at hom,e and my workshop is out of bounds at the moment so progress is slow...
I have the wired throttle and the brake and top deck fitted..just to finish the electrics to fully install and its ready to go..

rear brake- simple but effective

wired throttle-

grip tape fitted-

I have the wired throttle and the brake and top deck fitted..just to finish the electrics to fully install and its ready to go..
rear brake- simple but effective
wired throttle-
grip tape fitted-
666yeti666
100 W
- Joined
- Jan 8, 2014
- Messages
- 183
Nice !!
well -there seems to be a problem with the ESC- its just got way too much power- or its the sensitivity of my thumb...i just cannot ride it it- its way too powerful on the set off- i'm sure its just a small programming fault but better too much power than not enough..


666yeti666
100 W
- Joined
- Jan 8, 2014
- Messages
- 183
Maybe asking Bruno to program a non lineair throttle curve/response in the ESC ?
This would be possible to program into a conventional transmitter used for airplanes/heli's ....
This would be possible to program into a conventional transmitter used for airplanes/heli's ....
the same-yes ( although this is the sensored type)
hmmm..i need to speak with Bruno ... did you try the lowest acceleration setting..soft?
what was the answer in the end..?
the problem at the moment is that i cannot get it to communicate with my pc now.. when i did my first ride/test i used a rc handset and it was just right but I'm using a wired throttle and it appears to be working fine on the bench but as soon as i tried to ride it -its just vicious acceleration cannot hold on.. so it may just be the esc settings...( if i can get it to communicate)
there is a setting on the ESC for linear/logarithmic etc..but it doesn't actually seem to do anything..
hmmm..i need to speak with Bruno ... did you try the lowest acceleration setting..soft?
what was the answer in the end..?
the problem at the moment is that i cannot get it to communicate with my pc now.. when i did my first ride/test i used a rc handset and it was just right but I'm using a wired throttle and it appears to be working fine on the bench but as soon as i tried to ride it -its just vicious acceleration cannot hold on.. so it may just be the esc settings...( if i can get it to communicate)
there is a setting on the ESC for linear/logarithmic etc..but it doesn't actually seem to do anything..
Jan Christian
100 W
- Joined
- Oct 26, 2013
- Messages
- 129
Haha never thought to much power could be a problem until I met brushless motors
benj
100 W
- Joined
- Jun 6, 2013
- Messages
- 242
Yeah I tried pretty much every ESC setting but no success. I just figured 10S was a bit too much (yep, I also can't believe I said it!!!)
Linear, Exp, Log curves - linear best for me, as it's the most predictable. Exponential gave a soft start, but too soft and it struggled to get my heavy board going.
Acceleration - soft - anything else was way too mental!
Motor timing, tried all the options, but a low degree seemed best.
I didn't contact Bruno as I just came to the conclusion that this is how 10S behaves. Would be interesting to see if that's the case, or if it can be tamed.
Linear, Exp, Log curves - linear best for me, as it's the most predictable. Exponential gave a soft start, but too soft and it struggled to get my heavy board going.
Acceleration - soft - anything else was way too mental!
Motor timing, tried all the options, but a low degree seemed best.
I didn't contact Bruno as I just came to the conclusion that this is how 10S behaves. Would be interesting to see if that's the case, or if it can be tamed.
no -it can definitely be tamed as I used 2x 3kw motors on my dual diagonal board..yes its pretty lively  but its rideable..
but its rideable..
and as i say when i first rode it using a rc handset its was nice to ride - it was just the awkward positon i was in holding the hand control whilst holding the handle bar..but power wise it was nice..so i'm tending to think its the wired throttle..
i have good muscle memory in my forefinger but no so with the thumb... ( one of the ways i have tamed the dual 6kw- by being super sensitive with my finger)
and as i say when i first rode it using a rc handset its was nice to ride - it was just the awkward positon i was in holding the hand control whilst holding the handle bar..but power wise it was nice..so i'm tending to think its the wired throttle..
i have good muscle memory in my forefinger but no so with the thumb... ( one of the ways i have tamed the dual 6kw- by being super sensitive with my finger)
benj
100 W
- Joined
- Jun 6, 2013
- Messages
- 242
So the only difference is the wired control? Same ESC and settings?
Perhaps the resolution of the wired control is smaller, resulting in shorter sharper changes in throttle response? Not sure how easy that is to test or if the specs of that throttle control are available somewhere?
Perhaps the resolution of the wired control is smaller, resulting in shorter sharper changes in throttle response? Not sure how easy that is to test or if the specs of that throttle control are available somewhere?
daverobson08
100 W
Why not have the trigger on the TX above the bar rather than under? Then you can use your index finger for the throttle rather than your thumb. Or am I misunderstanding the setup?
benj said:So the only difference is the wired control? Same ESC and settings?
Perhaps the resolution of the wired control is smaller, resulting in shorter sharper changes in throttle response? Not sure how easy that is to test or if the specs of that throttle control are available somewhere?
yes- that's what i thought- it may actually be the throttle interface- Bruno might have sent the wrong one. i've got to test it see..
Why not have the trigger on the TX above the bar rather than under? Then you can use your index finger for the throttle rather than your thumb. Or am I misunderstanding the setup?
i cannot use the TX as the receivers seem to blow on this setup- very strange...so ive had to go to a wired throttle- its a real pity as i think the brake would work well..
Uri.Hindri
1 µW
- Joined
- Oct 6, 2013
- Messages
- 1
very cool build dude!
Could you share your gear ratio and motor KV?
also, where did you buy the drive belt cog / sprocket?
Thanks a lot!
Uri
Could you share your gear ratio and motor KV?
also, where did you buy the drive belt cog / sprocket?
Thanks a lot!
Uri
its a 14T motor pulley and 40T driven pulley
I made them- as this is a prototype- but similar products can be bought on my website..
http://www.aliendrivesystems.com/
I made them- as this is a prototype- but similar products can be bought on my website..
http://www.aliendrivesystems.com/
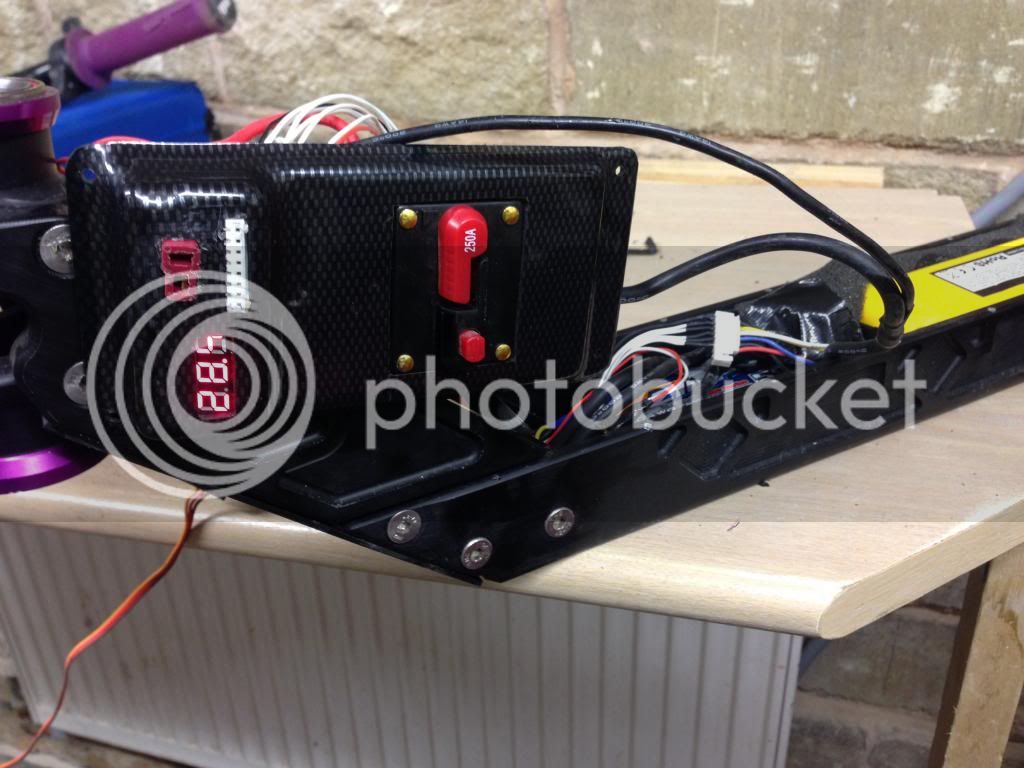
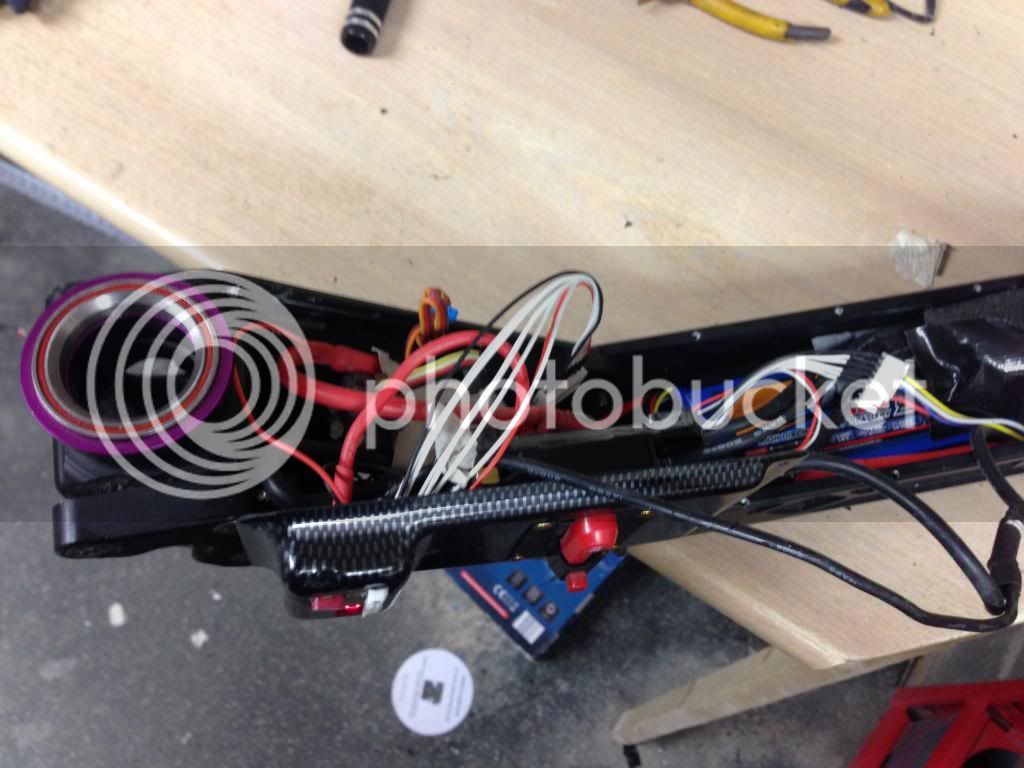
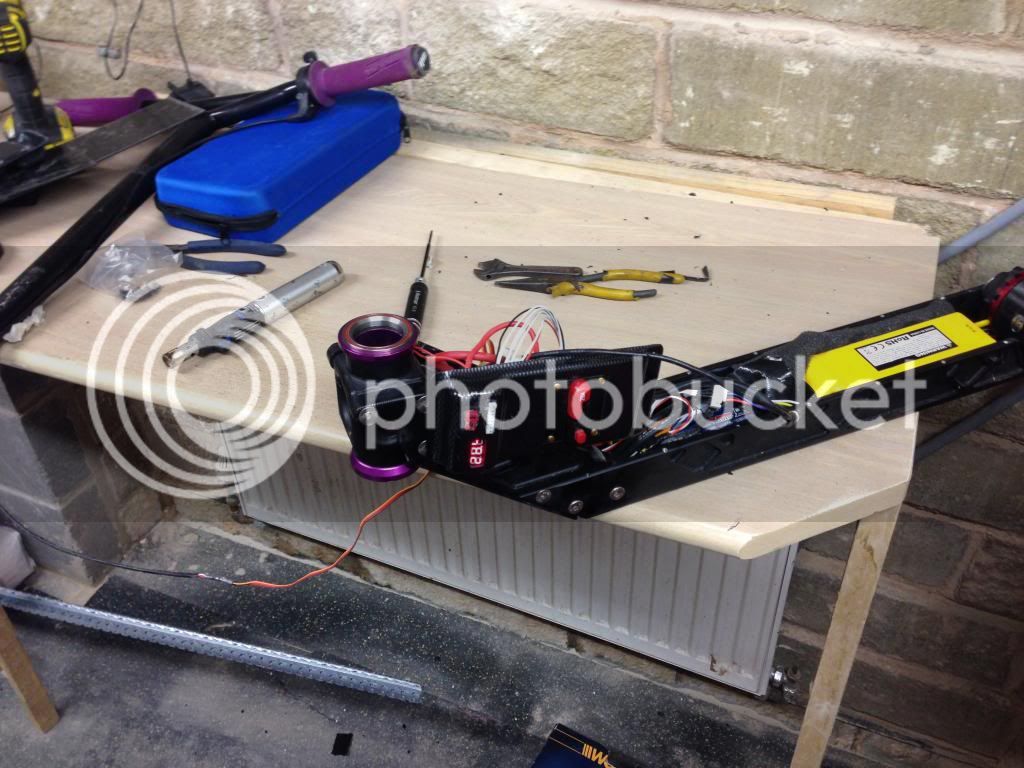
I was up till late last to complete the scoot and I finally got to ride the scooter after how many months !!! Its running on 7S and using the micro ESC from Bruno( not the 10s i had planned)which has the advantage of being easy to charge and to use a kill switch instead of the XT90 plug and also is easily mountable due to the size.I think ill still try the 10S eventually
The gear ratio on the first run was 15Tx44T and it was way to torquey and just wanted to wheelie away and the top speed was rubbish 12-14mph or so... so i came home disappointed to say the least....I nearly dismantled it to put the ESC back on the test board...but i changed the ratio to 15Tx36T and WOW what a transformation..it pulls nicely away and the top speed is about 18mph..maybe upto 20mph when fully charged..so i may just drop to 32T and change the ESC acceleration setting to 'Med' instead of 'Soft'
I would say 8S would be perfect on this ratio..it does jump up kerbs nicely and feels really solid just like a stunt scooter..
..the one thing i did notice were the tyre got pretty hot !! I wonder what Skikes are speed rated at...lol

ESC cooling vent







The gear ratio on the first run was 15Tx44T and it was way to torquey and just wanted to wheelie away and the top speed was rubbish 12-14mph or so... so i came home disappointed to say the least....I nearly dismantled it to put the ESC back on the test board...but i changed the ratio to 15Tx36T and WOW what a transformation..it pulls nicely away and the top speed is about 18mph..maybe upto 20mph when fully charged..so i may just drop to 32T and change the ESC acceleration setting to 'Med' instead of 'Soft'
I would say 8S would be perfect on this ratio..it does jump up kerbs nicely and feels really solid just like a stunt scooter..
..the one thing i did notice were the tyre got pretty hot !! I wonder what Skikes are speed rated at...lol
ESC cooling vent
robnewyork
100 µW
- Joined
- Feb 20, 2014
- Messages
- 9
AMAZING
666yeti666
100 W
- Joined
- Jan 8, 2014
- Messages
- 183
Really , really nice built !
I'm curious on how did you solve the problem with the wired "thumb throttle controller" .
By the way, what's the resistance of that "thumb throttle controller" and where did you get it? I'm trying to find out if I can use it on my minibike as well.
I'm considering to make the simple pulse generator myself (http://www.hvlabs.com/555servo.html) but then I need to know the value for the variable resistor.
thanks
regards
sebastien
I'm curious on how did you solve the problem with the wired "thumb throttle controller" .
By the way, what's the resistance of that "thumb throttle controller" and where did you get it? I'm trying to find out if I can use it on my minibike as well.
I'm considering to make the simple pulse generator myself (http://www.hvlabs.com/555servo.html) but then I need to know the value for the variable resistor.
thanks
regards
sebastien
its just a standard throttle from Bruno and one of his 1-4V throttle interfaces...
http://alienpowersystem.com/shop/electric-throttle/electric-throttle-1-4v-hall-effect/
http://alienpowersystem.com/shop/electronics/alien-throttle-interface-1-4v/
http://alienpowersystem.com/shop/electric-throttle/electric-throttle-1-4v-hall-effect/
http://alienpowersystem.com/shop/electronics/alien-throttle-interface-1-4v/
Similar threads
- Replies
- 19
- Views
- 4,209
- Replies
- 47
- Views
- 13,869
- Replies
- 6
- Views
- 1,906
- Replies
- 3
- Views
- 2,704
- Replies
- 109
- Views
- 34,122