markz
100 TW
I tend to learn better when I write things out, and I stumbled on the whole Kv torque myth last night. I caught myself quickly though. I just have a quick question and please tell me if I did the motor sim and explanation correctly.
On the motor simulator I am choosing the MXUS 3000W 4506 and 4503.
Here are the quick notes.
MXUS 3000W 4506 is 45mm stator and 6T (x10) has a Kv of 11.9
MXUS 3000W 4503 is 45mm stator and 3T (x21) has a Kv of 6.0
I have no idea if these 2 motors have the same "copper fill"
Is it just a matter of 3x21=63 and 6x10=60 ?
What does that mean exactly? 3 turns of 21 strands and 6 turns of 10 strands?
*If that be the case maybe I should have picked two motors with different Kv's but same copper fill.
Here are the references.
https://endless-sphere.com/forums/viewtopic.php?f=30&t=63142&hilit=mxus#p944431
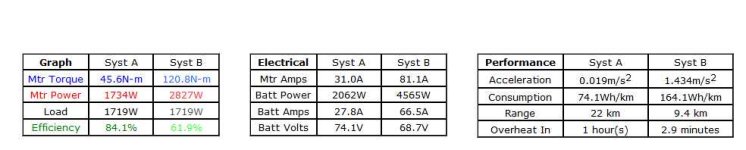
To match up the 2 motors and debunk the myth of a higher turn count motor having higher torque, which is false. The truth is they have the same and I think the key term there is "with the same copper fill" which is why I asked my questions. I did this in the first motor simulator. Then change 4503 to 16" wheel and the overheat time is 41 minutes compared to 2.9 minutes, picture #2 below.
To get the torque lines the same - I decreased the controller resistance in System A 4503, and decreased the System B 4506 controller amps. Decrease the throttle in System A 4503 and the graph matches up.
The 4503 has thicker and shorter wire which can take more amps, as seen in the quote above. That is why I decreased the resistance in the motor simulator for 4503. The 4506 has thinner and longer wire which increases the resistance (increases the heat, and heat by itself increases resistance) which does not allow for more amps so the motor would over heat quicker when its given more amps.
I think another characteristic to look at is the torque curve, the 4506 falls off sooner and has a lower speed where the red meets the black line. Also an interesting note is to see the efficiency.
A good way to go, I believe is to go with the 4503 that gives you a higher speed, but decrease the wheel diameter which reduces the speed but allows you to keep the motor running cool when pushing amps.
The argument to that fact is when you have a smaller wheel diameter say a 20" as apposed to a 26" or 29", you dont get good maneuverability to roll over pot holes for example. But the downside to going 29" is the motor would over heat faster as seen in the graphs below which I will leave in the attachments.
You have to take into consideration if you are building a system from scratch, so you can pick and choose the motor wind, controller, wheel size, the speed you want, then look at your riding style, are you riding on flat or hilly streets, or is it stop and go commuter, maybe its trail riding.
View attachment 4
View attachment 1

On the motor simulator I am choosing the MXUS 3000W 4506 and 4503.
Here are the quick notes.
MXUS 3000W 4506 is 45mm stator and 6T (x10) has a Kv of 11.9
MXUS 3000W 4503 is 45mm stator and 3T (x21) has a Kv of 6.0
I have no idea if these 2 motors have the same "copper fill"
Is it just a matter of 3x21=63 and 6x10=60 ?
What does that mean exactly? 3 turns of 21 strands and 6 turns of 10 strands?
*If that be the case maybe I should have picked two motors with different Kv's but same copper fill.
Here are the references.
https://endless-sphere.com/forums/viewtopic.php?f=30&t=63142&hilit=mxus#p944431
21X3T Winding
Phase resistance = 0.072 Ohms
RPM at 50V = 597, 11.9 Kv
1.78A/89.4 Watts, No Load
16X4T Winding
Phase resistance = 0.110 Ohms
RPM at 50V = 448, 8.9 Kv
1.08A/54.2 Watts, No Load
12X5T Winding
Phase resistance = 0.163 Ohms
RPM at 50V = 359, 7.1 Kv
0.84A/42.2 Watts, No Load
10X6T Winding
Phase resistance = 0.225 Ohms
RPM at 50V = 299, 6.0 Kv
0.64A/32.1 Watts, No Load
All bare hub motors (no spokes or rim) weigh in at right around 9.14 Kg / 20.2-lbs
According to Justin's data, Teslanv get the following phase current limits on the various windings:
MXUS XF40-45H "3000W" Direct Drive Hub Motor Series:
3T:
Max. Continuous Phase Current: 55A
Overheat in 10 Minutes: 85A
Overheat in 60 seconds: 242A
4T:
Max. Continuous Phase Current: 42.6A
Overheat in 10 minutes: 66A
Overheat in 60 seconds: 186A
5T:
Max. Continuous Phase Current: 34.9A
Overheat in 10 minutes: 51.6A
Overheat in 60 seconds: 150A
6T:
Max. Continuous Phase Current: 30.3A
Overheat in 10 minutes: 47A
Overheat in 60 seconds: 132A
Generic Winding Phase Current Limits per strand:
Max. Continuous Phase Current: 2.84A per strand
Overheat in 10 minutes: 4.4A per strand
Overheat in 60 seconds: 12.4A per strand
*All data assumes a non-vented hub motor. Venting or other methods of cooling should increase these values.
To match up the 2 motors and debunk the myth of a higher turn count motor having higher torque, which is false. The truth is they have the same and I think the key term there is "with the same copper fill" which is why I asked my questions. I did this in the first motor simulator. Then change 4503 to 16" wheel and the overheat time is 41 minutes compared to 2.9 minutes, picture #2 below.
To get the torque lines the same - I decreased the controller resistance in System A 4503, and decreased the System B 4506 controller amps. Decrease the throttle in System A 4503 and the graph matches up.
The 4503 has thicker and shorter wire which can take more amps, as seen in the quote above. That is why I decreased the resistance in the motor simulator for 4503. The 4506 has thinner and longer wire which increases the resistance (increases the heat, and heat by itself increases resistance) which does not allow for more amps so the motor would over heat quicker when its given more amps.
I think another characteristic to look at is the torque curve, the 4506 falls off sooner and has a lower speed where the red meets the black line. Also an interesting note is to see the efficiency.
A good way to go, I believe is to go with the 4503 that gives you a higher speed, but decrease the wheel diameter which reduces the speed but allows you to keep the motor running cool when pushing amps.
The argument to that fact is when you have a smaller wheel diameter say a 20" as apposed to a 26" or 29", you dont get good maneuverability to roll over pot holes for example. But the downside to going 29" is the motor would over heat faster as seen in the graphs below which I will leave in the attachments.
You have to take into consideration if you are building a system from scratch, so you can pick and choose the motor wind, controller, wheel size, the speed you want, then look at your riding style, are you riding on flat or hilly streets, or is it stop and go commuter, maybe its trail riding.
View attachment 4
View attachment 1