The7 said:Thanks for this piece of valuable information.
Grateful if you give an more detailed explanation and with an circuit diagram if possible.
there is a drawing of the 3525 pwm chip at the beginning of this thread. it is also used for low voltage cutoff and current limiting. values for the soft start cap and resulting timing are also discussed earlier in this thread.
if you mean a drawing of how to hook up the cycle analyst you will find that information on ebikes.ca
if you mean "a more detailed explanation" of how to defeat the speed/current limiting, you just disconnect the cycle analyst's output control line from the controller ebrake line (or throttle input) to prevent the cycle analyst from pulling down the throttle line. the CA will drive the control line low, and when nothing happens it will just keep trying. i believe there is a drawing of how the CA would be connected to the throttle line on ebikes.ca for cases where you cannot use the ebrake line or for controllers other than the crystalyte units, where the ebrake line may not be a linear signal as it is in the crystalytes.
for a similar implentation of current limiting pulling down the throttle line, see the thread on "fechter's current based throttle"
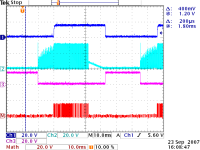
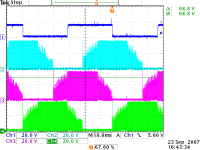
![hall_sensor_outputs[blu_grn_yel].png](/sphere/data/attachments/2/2667-21ac676491896adfff068ed5f26b5272.jpg)