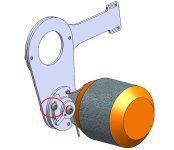
Not sure if I should start a new thread, but wanted to share my progress so far with one of Kepler's prototype brackets.
Please keep in mind I am a mechanical engineer, with very limited electrical experience! Anything electrical related that I have done may be wrong and should be questioned extensively.

I installed the friction drive with a 230kv 50mm motor, driven by a VESC-X. My bike is mounted on a wind trainer which provides some wheel resistance at speed.
18v milwaukee battery running through a power meter and into the VESC. I set up the motor in FOC mode, which does seem quieter.
the system seems to run ok, outputs ~200 watts at full rpm, which increases when I apply the brake a bit.
230kv*18v= 4,140rpm. 50mm motor is 157mm cir. so at 18v I should be right around 39 km/h or 24mph, but am only at 29kmh or ~18mph.
This is my first time playing with any brushless motor, so I assume I am missing something. Does the Kv of a motor change as load is increased?
Hopefully I can throw more volts at the motor and get the speed I am looking for. Before I break anything, what settings in the VESC tool should I pay attention to before throwning 40v at it?
Next I need to figure out the throttle. Ideally I would mount a simple button to the bars that would provide a ~150W boost from 8-25mph. My plan is to limit battery current in the VESC software, and add a throttle that sends a 100% signal on the third sensor pin.
Any help from the more electrically capable members would be warmly received!
Here is the video of my setup
https://www.youtube.com/watch?v=_Rh217xJAMM
[youtube]Rh217xJAMM[/youtube]