atkforever said:Hello, I plan to buy a KT 60V 60A but the label on the controller says "KT60ZWSRK....". From my understanding ZW stands for square wave.
If I upload a new FW with the tool, will it run sine wave simplified FOC?
An other question : is it possible to run at 64v (16s battery) without any mods a KT labeled as 48V dc; this one for instance :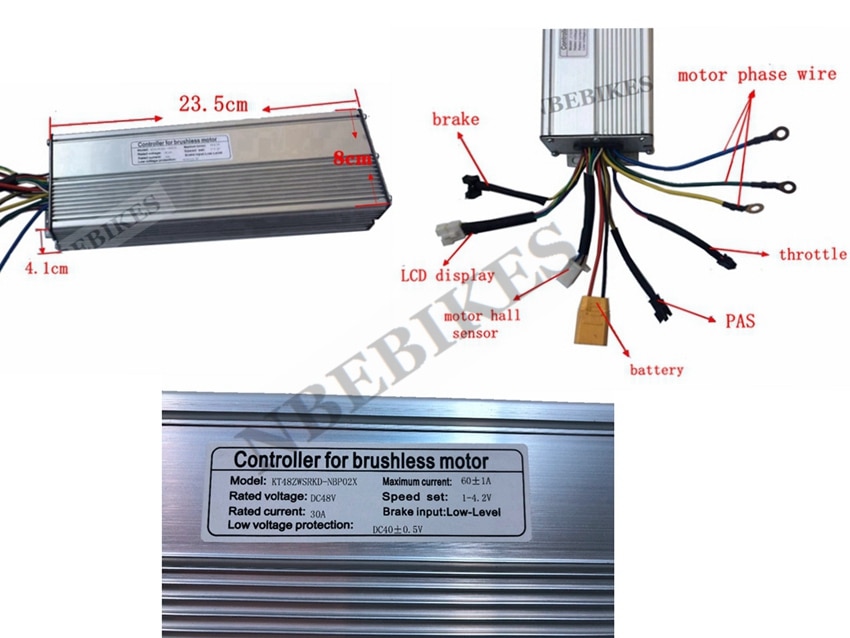
cheers
i run my KT 48v controller on 16s but charge to 62.8v
there are 63v capacitors in mine, my understanding is 63v
16s is usually charged to 67.2V
my understanding is that you need to stay under the 63V for most 48V controllers in general
running @16s i am not able to use the full capacity as i only charge to 62.8V but i get the higher power/speed maintained longer than running at 15s or 14s
hope that helps
") eg activate (off-road and assist 5) simultaneusly would get me fast back home or propapbly really slow (pushing bike back without walk assist after smoke escapes) :lol:
eg activate (off-road and assist 5) simultaneusly would get me fast back home or propapbly really slow (pushing bike back without walk assist after smoke escapes) :lol: