stancecoke said:
I've tried to get my BionX direct drive running on my bike with our firmware today, but it failed. I tried all combinations of Hall- and Phasewire connections and tried several values for MOTOR_ROTOR_DELTA_PHASE_ANGLE_RIGHT. The motor runs noisy and draws too much current in the best case :-(
What to do in this case?? Maybe:
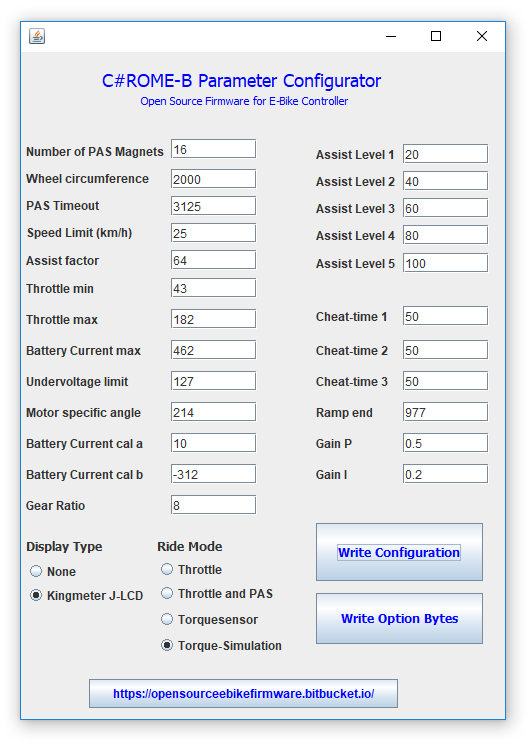
1. look at hall sensors signals and see that they are what we expect: 60 degrees between each changes
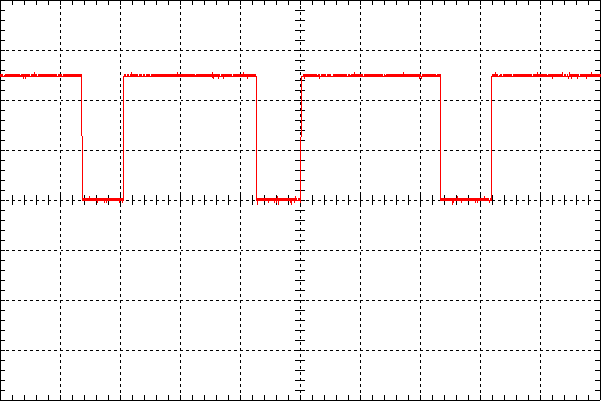
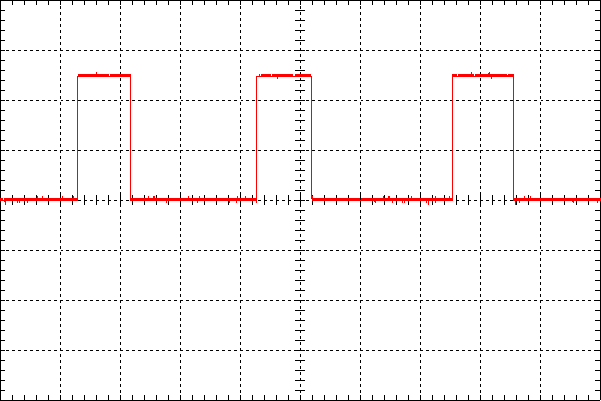
2. put a small resistor between each 2 phases and measure with the oscilloscope and look at the generated voltage BEMF, which should be sinewave (??) and also compare with the hall sensors signal.
stancecoke said:
I don't miss the motor power when starting to pedal. But that's just my personal opinion, in the german pedelecforum, there are many people who wanted the behavior as you describe, therefore the code of the "forumscontroller" was modified to have a "torque throttle" for start up.
Good to know I am not alone.
I miss because I drive my EBike as I drive my electric car, it only works has 1 gear and heavy
")
so need to make a lot of torque with my legs to start pedaling.
And this let me think on another idea!! For instance, the new Leaf electric car version says it can be driven with only 1 pedal, for accelerating, decelerating and even brake/full stop of the car. The same happens with the electric unicycle, where we don't have mechanical brakes.
What about using torque sensor for defining the ebike speed, from increasing the speed up do decrease/brake?? Just like the fixed gear bikes (yes, I like to ride them), that we reduce the crank speed when we want to reduce the bike speed as also to stop. With a direct drive motor, I think we could do this. I never tested an analog brake for command motor regen/brake but I think the torque sensor could be used for that (well, even PAS). Is this idea crazy?