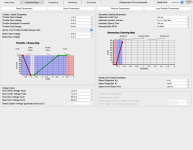
The F and D come up where it is labeled "throttle up ramp active". But you mentioned it should not matter because it's in bypass mode.
Right--in bypass mode it's a direct feed of throttle in to throttle out with no modification at all.
Passthru mode still applies limiting/ramping/etc, and allows PAS or torque sensors to work, but bypass doesn't.
Bypass is usually only used for testing, since most of the reasons for having a CA are to use it's throttle modification / limiting to customize a system's response to a rider's needs, or using PAS or Torque sensors, and bypass mode prevents any of that.
")
This is the previous setup I had made by KT,
Upgrade Kit.
It's a separate screen and controller. The setup I have now is the motor and CA connected to the PA.
Yeah, we see a lot of KTs here (there's even OpenSource Firmware OSF available for versions of them, allowing for other options than the factory FW).
Like you said it may not be a "problem". I'm just used to a smooth acceleration and the stuttering is just annoying. It keeps me awake at night trying to figure it out. I preorderd the Grin 45mm Fat All-Axle Motor, so I'm hoping I won't have the same issue
As long as you tune the system to your specific parts, battery voltages, etc., then it should work with "any" motor on there (any that works with the KT should be able to be made to work "just as well" with the PR, at least hypothetically.
We already know your motor works, and your batteries, with the KT.
If you want to make the PR work like the KT, you can simply test to see what differences in behavior / supply / etc there are between the two under the same conditions. For instance, if the KT draws more battery current than the PR, then you'd need to figure out how to cause the PR to do that (or to stop limiting the current at that time, etc). But you'd have to measure that current, preferably with the same meter (the CA can be used for this with an external shunt, or there are cheap dedicated wattmeters, etc). And so on for other differences in properties between the controllers, vs differences in behavior.
You'd also want to explore what all the settings in the KT are set to, and what those settings mean in terms of system behavior under the conditions you're having issues with the PR. Then see if there are things in the PR equivalent to any of those specific settings that relate to the problem conditions, and set them incrementally in ways that vary the behavior under those conditions until it gets worse or better, until you tune out the problem.
I'm still working on understanding all of what the PR settings do, relative to physical motor behavior, so I don't have specific suggestions.
For instance, on my system, with the old Grinfineon (sort of like a KT with no settings) pulls harder at startup than the PRv1 settings maxed out on phase amps (but not battery amps). Even though the PR settings are actually higher than the GF's hardware limits, the PR doesn't actually draw that full current at startup the same way. I can probably make it do so but i have yet to get time/etc to experiment with it. I have a thread here for all that stuff, if you're interested in the eventual results:
So...this is probably going to be complicated, and requires some explanation of the setup, both as it is now where it doesn't work right, and as it was before when it did work fine. So...apologies for the length. I'm very tired after working on this for the last 12+ hours, so I'll probably...

endless-sphere.com
Unfortunately because the GF doesn't have any settings to see or change, I can't even do what you can do with your setup to analyze the differences, I can only compare the external symptoms and behaviors (like battery current vs motor torque, etc).