Hey, just wanted to share, so I manage to get the votol data out out the can bus. I used the Votol EM260-SP (SP => can version i think). I dont have an EM100 can version at the moment, but maybe someone might be able to experiment on their EM100 and share their results.
I used the included blue usb2can programmer, and probe its TXD and RXD on its CAN transceiver chip using a logic analyzer. Instead of probing its CANH and CANL, doing this makes sure of the data direction coming in and out of the programmer and votol.
Heres what i found:
First the can bus is 250kbit/s (measured using oscilloscope)
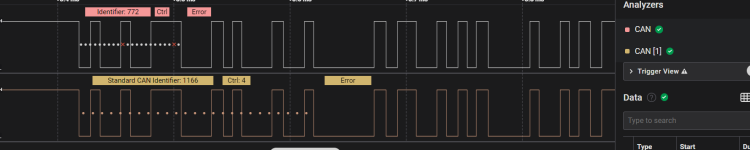
By default, the votol sends some data by itself that contains some information that I havent decoded yet. There are 4 frames with ids 270929954, 269047200, 268981664, 270929955.
To get useful parameters, you need to request it by sending 2 frames, one is
StdId = 1023; Data Len = 8; Data[0] = 9; Data[1] = 85; Data[2] = 170; Data[3] = 170; Data[4] = 0; Data[5] = 170; Data[6] = 0; Data[7] = 0;
And the other one
StdId = 1023; Data Len = 8; Data[0] = 0; Data[1] = 24; Data[2] = 170; Data[3] = 5; Data[4] = 210; Data[5] = 0; Data[6] = 32; Data[7] = 51;
After those 2 frames is sent, votol will immidiately sent 3 frames, all 3 has the id of 1022, and a combined data of 24 bytes. This 24 bytes closely resembles data from the serial communication protocol (theres a thread documenting it titled VOTOL serial communication), with the difference of 2 byte offset.
(copied from the aforementioned thread, with correction to match the can version)
B7~B8:02 14 converts into fixed-point Dec is the battery voltage, for my case it is 53.2V
B9~B10: 00 0f converts into fixed-point Dec is the battery current, for my case is 1.5A
B16~B17: 02 b8 converts into integer is the rpm, for my case is 696
B18: 5d converts into Dec - 50 is the Controller temp, for my case is 43C
B19: 4b converts into Dec - 50 is the External temp, for my case is 25C
B18~B19: 22 d6 converts into integer is the temperature coefficient, for my case is 8918
B22:{
bit0~1= 0:L, 1:M, 2:H, 3:S
bit2=R
bit3=P
bit4=brake
bit5=antitheft
bit6=side stand
bit7=regen
}

Note that this information comes from my specific use case with my own setting and might not work on your case (or worse, change parameters or break stuff), so save your working parameters first then start experimenting.