
SlowCo
1 MW
I'm also still following with much interest. Great build and nice progress again!
Yeah Hackey told me needs a week for testing but he has what you and I Both needYes, if it is the same on the newer motors? They changed the front and rear covers, so it might not be the same mounting points etc. Hackey had made encoders for some motors too, so he might have something that fits. The problem is that I want to ride now. And it is 2-3 weeks or something to a big competition that I already signed up for, so I am rather short on time for sending stuff halfway across the world.
I know it wasnt the smartest move to change controller in the middle of high season, but I didnt want to have it just lie here for months when I finally got it.
 Guess it's just going to be a time thing now.How bad is it to ride?Also at what erpm does it switch atm
Guess it's just going to be a time thing now.How bad is it to ride?Also at what erpm does it switch atm



oh really,It is not very bad, it stutters a little when it switches over if you are hard on the throttle. I could also feel a little stutter a few times at higher rpm at high power. I only run 700pA and 300bA though. That was on a partly pretty fast track on Sunday.
Hackey said he would finish a beta version of 6.05 that would probably solve the problem and we agreed on a time on Tuesday.
But then he wasnt there.
Wednesday I went riding, but something happened, the motor started running rough. I didnt know how to read fault codes on the phone, so I dont know what it was
I think it felt like I lost a phase, but an hour later when I unloaded the bike at home it was fine again
Anyway, today we were supposed to try again with the new firmware. Hackey just needed half an hour to eat first, but that is 2 and a half hour ago. So not this evening either it seems..
He said that they are moving to a bigger place, and that is why it is so unpredictable.
 I can't have it running like that on a MX track and tbh anything other than bloody perfect for what it's cost me.How does this new firmware supposed to sort this problem I wonder He's been very helpful with me tbh so I'm sure he will sort it.Think I'm still going to go Encoder direction either way now tbh.
I can't have it running like that on a MX track and tbh anything other than bloody perfect for what it's cost me.How does this new firmware supposed to sort this problem I wonder He's been very helpful with me tbh so I'm sure he will sort it.Think I'm still going to go Encoder direction either way now tbh.That’s what I’m thinking for the cost we pay for these controllers there should be no issuesoh really,
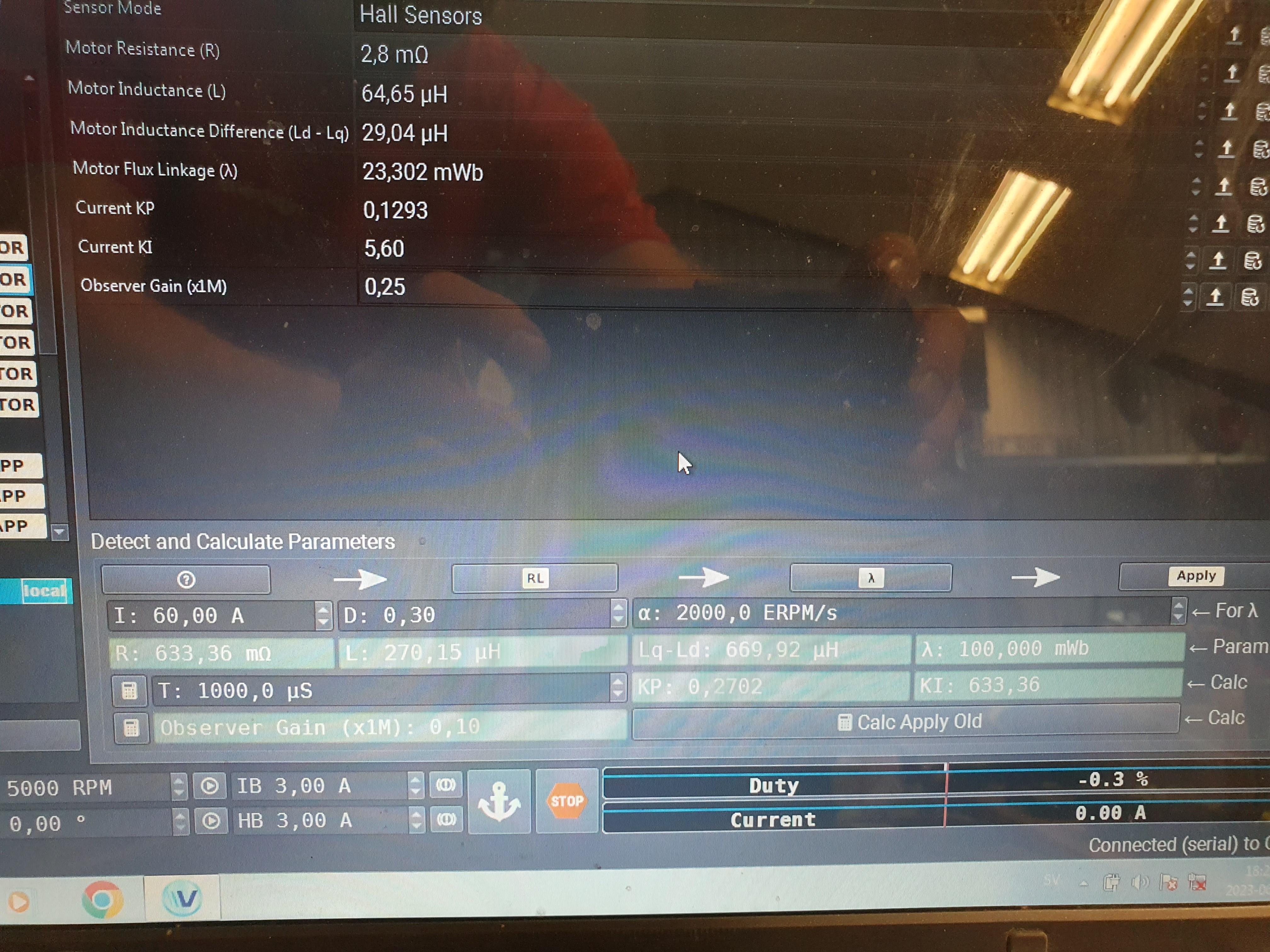
No, I have left it to Hackey to tune. I thought I might just as well, as he seems to know what he is doing and if something goes wrong it isnt because of my tuning attempts.. And he seems to prefer to do it. From what I understand sensorless isnt very good at big ipm motors.Have you tried running completely sensorless?
Should be easy to test, in vesc-tool: Motor Settings->FOC->General tab, set the Sensor Mode to 'Sensorless'
May not even have to disconnect the halls.
Then in: Motor Settings->FOC->Sensorless tab, you can play around with the openloop startup parameters.
I found the openloop preset buttons at the bottom of the tab really helped getting into the ballpark tuning for motor startup.
There should also be some changes to the observer so it works better on ipm motors.
If hitting the throttle at very slow speed twice in a row it often felt powerful the first time and sluggish the second.
You should be able to save and restore your settings, might be a good idea if you have something that works reasonably well before changing things. Kevin from Alien Rides talks about it in this video, at 16:00but he had erased all my settings
Qs 180 in not that common, I think mine is the first Hackey is setting up.
Not rare, but a lot less common than qs 138
I quess ipm motors hasnt been very common on vesc earlier, so it might not be that developed in that regard.
I havent read up on observers, but the idea I got was that it uses the motors back emf to calculate position and not use any sensors.
Yes, but if I load the old settings I erase the new. I suppose Hackey prefer to start fresh, if there would be some bad setting that messes up things among the old ones. In this case maybe it was necessary to start over as it is a new firmware?You should be able to save and restore your settings, might be a good idea if you have something that works reasonably well before changing things. Kevin from Alien Rides talks about it in this video, at 16:00

I started working on my race trolley:
I will add a little side support, it seems like the batteries could overturn if you get a bit overenthusiastic pushing the trolley

It looks like it is time to change back to the fardriver, or what do you think?

