
FYI
PC version change setting need send all settings at once. And transmit so slow, we need take an heavy notebook near your ride either.
so made this APK for speed up reading and change gear real time.
How to connect wih Bluetooth:
1. paired BT from phone setting
2. press BT button (default name is "slave")
3. selet your BT device name
How to change em-150 setting by phone:
1. select "s1" or "s2" for setting, or select for quick "EBS" "HDC" "Paddle" setting change. (some setting need press "Rst" or power off)
2. scroll down screen and choose one setting you want to change.
3. change the value by scrolling bar, setting will save to em-150 and read back from em-150 by BT
4. press "Lock" will lock your wheel prevent someone move your e-bike, you can press "Rst" or power OFF -> ON to release it
View attachment 331281
How to save setting group:
1. select "SaveRec"
2. the "normal" group will change to "Backup1" group
3. click "Backup1" group and choose one name which you want to save all setting in it.
View attachment 331277
View attachment 331279
How to recall all setting from setting group:
1.select your group name, stored setting will temperory load on phone
2. press "Upload" to send to em-150
3. if you want to cancel your choose group setting, press "Read" to read back form em-150
How to read/record your riding Km, WhKm ...
1. load APP, connected and riding
2. if you need record to another row, close APP and relaunch it
View attachment 331280
How to calibrate speed on phone (since em-150 only sending RPM data)
1.Current wheel size is 10inch, increase "RPM2Km" if your wheel size or speed is lower than realtime GPS.
View attachment 331284
View attachment 331285
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Votol EM-100 & EM-150 controllers
- Thread starter Stefanj.
- Start date
Hello,
I have Votol EM-30s controller and BM1418ZXF 750W 48V motor.
Can someone tell me how to calibrate and do I have to do it before or after KP / KI adjustment?
Calibration menu was go to error count box and delete the 0, then hold shift, and press while shift pressed the button '~' twice?
Also I don't want to use FW so, if I put 0 value there is it disabled?
How speed limit works? does it limit also power or just a speed? Can I limit speed without infuelence power with HDC?
Is it possible to disable regen somehow?
Thank you!
I have Votol EM-30s controller and BM1418ZXF 750W 48V motor.
Can someone tell me how to calibrate and do I have to do it before or after KP / KI adjustment?
Calibration menu was go to error count box and delete the 0, then hold shift, and press while shift pressed the button '~' twice?
Also I don't want to use FW so, if I put 0 value there is it disabled?
How speed limit works? does it limit also power or just a speed? Can I limit speed without infuelence power with HDC?
Is it possible to disable regen somehow?
Thank you!
Does anyone know is there something else which have auto calibration. I tried this method (without bin) and it works and find correct hall shift angle.
votol auto calibration
It would be nice if I could auto calibrate KP and KI values also.
I tried use this method for KP / KI values, but I don't know..
"Start to set to zero the Ki parameter, then increase the Kp parameter till system start to be unstable. This gives you the maximum stable Kp parameter that must stay below an half of this value. Finally, increase progressively the Ki parameter, and decrease of the same amount the Kp. A precise description of a tuning is also known as the Ziegler Nichols tuning method."
votol auto calibration
It would be nice if I could auto calibrate KP and KI values also.
I tried use this method for KP / KI values, but I don't know..
"Start to set to zero the Ki parameter, then increase the Kp parameter till system start to be unstable. This gives you the maximum stable Kp parameter that must stay below an half of this value. Finally, increase progressively the Ki parameter, and decrease of the same amount the Kp. A precise description of a tuning is also known as the Ziegler Nichols tuning method."
Last edited:
Hello,
Can you make this app to support BLE devices? I have smart bms bluetooth dongle, but it cannot pair to android, only windows.
Thanks!
BLE need set specified ID and call ID to read message, and some old phone not support BLE. That's why I'm not coding for BLE. 'ecause BLE more secure and not recommand for big data transfemation. I suggest chnage for classic BT. It's easy and more cheap.Hello,
Can you make this app to support BLE devices? I have smart bms bluetooth dongle, but it cannot pair to android, only windows.
Thanks!
Hello,
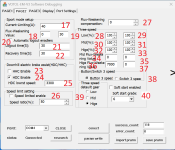
I readed this whole thread plus few manuals and youtube videos, but I still don't get this right. I take screen shots from software and number it, so anyone can comment now easily different parts of it.
Sorry for my bad english!
a1 = controller model, no influence with any setting
a2 = battery voltage, no influence with any setting
a3 = over voltage, must put really high, because controller shut down if voltage goes for that. example regen braking with full battery.
a4 = under voltage, must put higher than BMS cutoff, or mosfets can blowup if voltage goes under this while driving.
a5 = soft undervoltage, must have 1-2v higher than under voltage. this lowers power 10% ?
a6 = ?
a7 = busbar current, only works when gear is low or med, with high or sport uses sport mode (b17) value
a8 = phase current, don't touch
a9 = low protect, if this or below gives hall error
a10 = start voltage, this is where throttle starts (if I measure it from cables with multimeter it doesn't match, must put 0.1-0.2v higher, or can give hall error).
a11 = end voltage, this is where throttle stops (if I measure it from cables with multimeter it doesn't match, must put 0.1-0.2v lower, or can give hall error).
a12 = high protect, voltage must stay below this or gives hall error.
a13 = start torque, can be just 0
a14 = can be just 0. higher- longer delay keep throttle high
a15 = rate of rise, how agressive throttle is 0-255. higher value = more agressive. don't use 0, will be stay zero accerate.
a16 = rate of decline, same thing than rise, but when you let go from throttle. 0-255. higher value = more agressive.
b17 = busbar current limit for high & s gears
b18 = flux-weakening start RPM?
b19 = flux-weakening gain? someone says this is Current PI loop KI value? If it's KI where is KD?
b20 = ?
b21 = ?
b22 = ?
b23 = Hill Hold
b24 = Hill Descent Control
b25 = if you enable Hill Descent Control you can put here RPM and you can use it to limit rpm (speed).
b26 = Speed limit, approxiate decrease % of RPM, not decrease current.
b27 = ?
b28 = someone said that this influence to voltage?
b29 = someone said that this influence to current?
b30 = someone said that this influence to voltage?
b31 = someone said that this influence to current?
b32 = someone said that this influence to voltage?
b33 = someone said that this influence to current? in some setups I saw that this was 0, why?
b34 = flux-weakening start RPM?
b35 = flux-weakening gain?
b36 = flux-weakening start RPM? someone says this is Current PI loop KP value? If it's KP where is KD?
b37 = flux-weakening gain?
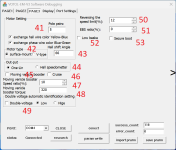
b38 = 3-speed button or switch choise
b39 = 3-speed default gear at start
b40 = soft start, influence RPM increasing.
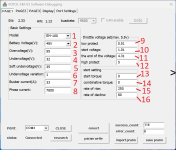
c41 = motor pole pairs, influence only for correct RPM reading?
c42 = motor magnets type
c43 = hall shift angle, very important!
c44 = speed singal type
c45 = when you push your bike/moto with your feet, it will detect you're not riding and help u push your bike/moto
c46 = ?
c47 = ?
c48 = ?
c49 = ?
c50 = reverse speed limit, if you use reverse
c51 = electronic brake ratio (regen). don't put large value! with chain drive / gears use 0 (it still do some regen)
c52 = enable break when your buttion is pressed and connected to GND, another way is coneected to 12V
c53 = ?
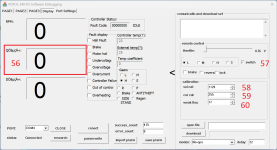
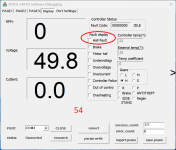
d54 = just realtime display, can't change anything. If you got "hall fault" it's because throttle voltage settings
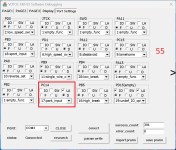
e55 = this is intresting, you can do some, but I don't know much. I disabled park by switching F -> D. Also there is guide how to do hall shift angle calibration automatic with this menu.
f56 = this should be below 200. I never get below 200 at middle or full throttle. Need help with this!
f57 = with this you can change those 3 digital display to show different thing. by clicking it twice it shows that value which needs to bee below 200.
f58 = if you have multimeter, you can calibrate your battery voltage with this.
f59 = same thing with current
f60 = this should influence to flux-weakening, but I'm not sure.
I readed this whole thread plus few manuals and youtube videos, but I still don't get this right. I take screen shots from software and number it, so anyone can comment now easily different parts of it.
Sorry for my bad english!
a1 = controller model, no influence with any setting
a2 = battery voltage, no influence with any setting
a3 = over voltage, must put really high, because controller shut down if voltage goes for that. example regen braking with full battery.
a4 = under voltage, must put higher than BMS cutoff, or mosfets can blowup if voltage goes under this while driving.
a5 = soft undervoltage, must have 1-2v higher than under voltage. this lowers power 10% ?
a6 = ?
a7 = busbar current, only works when gear is low or med, with high or sport uses sport mode (b17) value
a8 = phase current, don't touch
a9 = low protect, if this or below gives hall error
a10 = start voltage, this is where throttle starts (if I measure it from cables with multimeter it doesn't match, must put 0.1-0.2v higher, or can give hall error).
a11 = end voltage, this is where throttle stops (if I measure it from cables with multimeter it doesn't match, must put 0.1-0.2v lower, or can give hall error).
a12 = high protect, voltage must stay below this or gives hall error.
a13 = start torque, can be just 0
a14 = can be just 0. higher- longer delay keep throttle high
a15 = rate of rise, how agressive throttle is 0-255. higher value = more agressive. don't use 0, will be stay zero accerate.
a16 = rate of decline, same thing than rise, but when you let go from throttle. 0-255. higher value = more agressive.
b17 = busbar current limit for high & s gears
b18 = flux-weakening start RPM?
b19 = flux-weakening gain? someone says this is Current PI loop KI value? If it's KI where is KD?
b20 = ?
b21 = ?
b22 = ?
b23 = Hill Hold
b24 = Hill Descent Control
b25 = if you enable Hill Descent Control you can put here RPM and you can use it to limit rpm (speed).
b26 = Speed limit, approxiate decrease % of RPM, not decrease current.
b27 = ?
b28 = someone said that this influence to voltage?
b29 = someone said that this influence to current?
b30 = someone said that this influence to voltage?
b31 = someone said that this influence to current?
b32 = someone said that this influence to voltage?
b33 = someone said that this influence to current? in some setups I saw that this was 0, why?
b34 = flux-weakening start RPM?
b35 = flux-weakening gain?
b36 = flux-weakening start RPM? someone says this is Current PI loop KP value? If it's KP where is KD?
b37 = flux-weakening gain?
b38 = 3-speed button or switch choise
b39 = 3-speed default gear at start
b40 = soft start, influence RPM increasing.
c41 = motor pole pairs, influence only for correct RPM reading?
c42 = motor magnets type
c43 = hall shift angle, very important!
c44 = speed singal type
c45 = when you push your bike/moto with your feet, it will detect you're not riding and help u push your bike/moto
c46 = ?
c47 = ?
c48 = ?
c49 = ?
c50 = reverse speed limit, if you use reverse
c51 = electronic brake ratio (regen). don't put large value! with chain drive / gears use 0 (it still do some regen)
c52 = enable break when your buttion is pressed and connected to GND, another way is coneected to 12V
c53 = ?
d54 = just realtime display, can't change anything. If you got "hall fault" it's because throttle voltage settings
e55 = this is intresting, you can do some, but I don't know much. I disabled park by switching F -> D. Also there is guide how to do hall shift angle calibration automatic with this menu.
f56 = this should be below 200. I never get below 200 at middle or full throttle. Need help with this!
f57 = with this you can change those 3 digital display to show different thing. by clicking it twice it shows that value which needs to bee below 200.
f58 = if you have multimeter, you can calibrate your battery voltage with this.
f59 = same thing with current
f60 = this should influence to flux-weakening, but I'm not sure.
Attachments
Last edited:
-no influence with any settingHello,
I readed this whole thread plus few manuals and youtube videos, but I still don't get this right. I take screen shots from software and number it, so anyone can comment now easily different parts of it.
Sorry for my bad english!
a1 = controller model (always EM-100, if I change it, it still comes back to EM-100)
-no influence with any settinga2 = battery voltage, ok, it's battery pack voltage but does it influence anything?
yesa3 = over voltage, must put really high, because controller shut down if voltage goes for that. example regen braking with full battery.
a4 = under voltage, must put higher than BMS cutoff, or mosfets can blowup if voltage goes under this while driving.
a5 = soft undervoltage, must have 1-2v higher than under voltage. this lowers power 10% ?
a6 = ?
a7 = busbar current, only works when gear is low or med, with high or sport uses sport mode (b17) value
a8 = phase current, don't touch
a9 = low protect, if this or below gives hall error
a10 = start voltage, this is where throttle starts (if I measure it from cables with multimeter it doesn't match, must put 0.1-0.2v higher, or can give hall error).
a11 = end voltage, this is where throttle stops (if I measure it from cables with multimeter it doesn't match, must put 0.1-0.2v lower, or can give hall error).
a12 = high protect, voltage must stay below this or gives hall error.
a13 = start torque, can be just 0?
yes, higer- longer delay keep throttle higha14 = ?, can be just 0?
0-255, don't use 0, will be stay zero acceratea15 = rate of rise, how agressive throttle is 0-255 or 0-250 I'm not sure. higher value = more agressive.
0--255a16 = rate of decline, same thing than rise, but when you let go from throttle. 0-255 or 0-250 I'm not sure. higher value = more agressive.
approxiate decrease % of RPM, not decrease currentb17 = busbar current limit for high & s gears
b18 = flux-weakening start RPM?
b19 = flux-weakening gain? someone says this is Current PI loop KI value? If it's KI where is KD?
b20 = ?
b21 = ?
b22 = ?
b23 = Hill Hold
b24 = Hill Descent Control
b25 = if you enable Hill Descent Control you can put here RPM and you can use it to limit rpm (speed).
b26 = Speed limit, I don't how this works. If it just change PWM it also adjust current (power). I use HDC instead until someone can test this.
influence RPM increasingb27 = ?
b28 = someone said that this influence to voltage?
b29 = someone said that this influence to current?
b30 = someone said that this influence to voltage?
b31 = someone said that this influence to current?
b32 = someone said that this influence to voltage?
b33 = someone said that this influence to current? in some setups I saw that this was 0, why?
b34 = flux-weakening start RPM?
b35 = flux-weakening gain?
b36 = flux-weakening start RPM? someone says this is Current PI loop KP value? If it's KP where is KD?
b37 = flux-weakening gain?
b38 = 3-speed button or switch choise
b39 = 3-speed default gear at start
b40 = soft start, influence throttle?
c41 = motor pole pairs, influence only for correct RPM reading?
speed singal typec42 = motor magnets type
c43 = hall shift angle, very important!
c44 = ?
when you push your bike/moto with your feet, it will detect you're not riding and help u push your bike/motec45 = ?
enable break when your buttion is pressed and connected to GND, another way is coneected to 12Vc46 = ?
c47 = ?
c48 = ?
c49 = ?
c50 = reverse speed limit, if you use reverse
c51 = electronic brake ratio (regen). don't put large value! with chain drive / gears use 0 (it still do some regen)
c52 = enable low brake?
c53 = ?
d54 = just realtime display, can't change anything. If you got "hall fault" it's because throttle voltage settings
e55 = this is intresting, you can do some, but I don't know much. I disabled park by switching F -> D. Also there is guide how to do hall shift angle calibration automatic with this menu.
f56 = this should be below 200. I never get below 200 at middle or full throttle. Need help with this!
f57 = with this you can change those 3 digital display to show different thing. by clicking it twice it shows that value which needs to bee below 200.
f58 = if you have multimeter, you can calibrate your battery voltage with this.
f59 = same thing with current
f60 = this should influence to flux-weakening, but I'm not sure.
-no influence with any setting
-no influence with any setting
yes
yes, higer- longer delay keep throttle high
0-255, don't use 0, will be stay zero accerate
0--255
approxiate decrease % of RPM, not decrease current
influence RPM increasing
speed singal type
when you push your bike/moto with your feet, it will detect you're not riding and help u push your bike/mote
enable break when your buttion is pressed and connected to GND, another way is coneected to 12V
Ok, thanks! I replace your comments to my post.

Attachments
Last edited:
Hi, I have a "hall fault" issue with my votol em150-2. No reaction to throttle I can get. I tried different throttle, remote control, different throttle voltage settings etc but no response and rpm on the motor. I did self-learning and the motor started to spin, I checked it with a different controller and got sure about that no problem on the motor. do you have any solution or suggestion? Thanks.
Attachments

Hi, I have the same problem. After reading your above message, I removed the P cable and function set as well from the software but it didn't solve my problem. Do you have any other method to share? Thanks.hi everyone, I solved it by removing the PARK function. Now I have tried the scooter and it is a splinter, too fast. Almost impossible to drive. It will be a lot of fun.
thanks you all
Hi, I have the same problem. After reading your above message, I removed the P cable and function set as well from the software but it didn't solve my problem. Do you have any other method to share? Thanks.
Hello again, I just read that you lost your project by fire. I am so sad to hear that. Best regards.hi everyone, I solved it by removing the PARK function. Now I have tried the scooter and it is a splinter, too fast. Almost impossible to drive. It will be a lot of fun.
thanks you all
Hi, I have the same problem. After reading your above message, I removed the P cable and function set as well from the software but it didn't solve my problem. Do you have any other method to share? Thanks.
Hello again, I just read that you lost your project by fire. I am so sad to hear that. Best regards.hi everyone, I solved it by removing the PARK function. Now I have tried the scooter and it is a splinter, too fast. Almost impossible to drive. It will be a lot of fun.
thanks you all
Hello everyone, I have new questions and hope that someone can answer them. Is this motor a 4 pole pair motor? There are 8 seperate magnets on the rotor. And can I understand the hall effect sensor angle from this photo? When I enter 4 pole pair and perform a self learning test, the profram can not understand the real hall angle, I enter different values before self learning test, after a short spin of the motor, the entered hall angle value does not change. And normally I can not run the motor as well. Thanks in advance.
Attachments


8 poles, 30 degreeHello everyone, I have new questions and hope that someone can answer them. Is this motor a 4 pole pair motor? There are 8 seperate magnets on the rotor. And can I understand the hall effect sensor angle from this photo? When I enter 4 pole pair and perform a self learning test, the profram can not understand the real hall angle, I enter different values before self learning test, after a short spin of the motor, the entered hall angle value does not change. And normally I can not run the motor as well. Thanks in advance.
Last edited:
My experience is u need try 3 phase randomly and with 3 Hall possible combination, and then work well. Good luck. ( remember use YB exchange setting if direction is wrong)Still having no luck finding the phase angle of a stock surron motor. How do you tell just looking at a picture?
So I will try 4 pole pairs and 30 degree, right? Are we measuring the shape angle of this sensor's outher size to determine the angle?8 poles, 30 degree
My other motor that I use it on my quad is a Unite motor and I sent an e-mail to the supplier, they said that it is a 4 pole pair 120 degree motor and I did not try it with these settings yet, may be this is the main reason of my problems I guess. Thank you so much.
AnSo I will try 4 pole pairs and 30 degree, right? Are we measuring the shape angle of this sensor's outher size to determine the angle?
My other motor that I use it on my quad is a Unite motor and I sent an e-mail to the supplier, they said that it is a 4 pole pair 120 degree motor and I did not try it with these settings yet, may be this is the main reason of my problems I guess. Thank you so much.
And what is the difference between 30 degree and -30 degree? How can I understand the direction of it?8 poles, 30 degree
Last edited:
Angle negtive means the coding for brushless ordering. Should swap that with hall sensor wire.An
And what is the difference between 60 degree and -60 degree? How can I understand the direction of it?

Magtive pole, you can count by the definition.


BTW, still remind you test all possible wire combaintion of wire, 'ecause it's the controller's limiation.
Last edited:
8 poles, and you can confirm your motor with a compass.So I will try 4 pole pairs and 30 degree, right? Are we measuring the shape angle of this sensor's outher size to determine the angle?
My other motor that I use it on my quad is a Unite motor and I sent an e-mail to the supplier, they said that it is a 4 pole pair 120 degree motor and I did not try it with these settings yet, may be this is the main reason of my problems I guess. Thank you so much.
Last edited:
8 poles
Please try new version, change the radius setting will be ok.Changed the overvoltage, everything worked!
Voltage and rpm are still displayed incorrectly!
View attachment 324766
View attachment 324770
View attachment 324771
Similar threads
- Replies
- 13
- Views
- 3,847
- Replies
- 13
- Views
- 9,297
