@prozyc
I expect that my post here above seems you quite strange because I refer to testing in 3 ways.
This is my fault.
In fact outside of this forum I also had some mail exchanges with ebikestuff.
I thought that prozyc was the pseudo name of Ebikestuff on this forum and this created some confusions.
FYI ebikestuff makes also some tests on a home trainer with version 13. He provided a video that I callled test 1 in post above.
To clarify things I put here below a related mail from ebikestuff:
I did a few tests. The video can be seen here:
While doing the high amps test I've noticed that the battery connector gets hot. Probably a bad solder joint. This might have affected the efficiency a little so I soldered a new connector to make sure everything is working fine. The last test in the video above is with the new battery connector. I don't know if there's any difference.
Anyway. It seems like the efficiency is fine when using higher foc multiplier. As you can see on the video, the higher values like 28 or even 30 result in the highest rpm. The power output on the home trainer seems to be reflecting that. It's hard to tell the difference between those higher values. I would have to record a longer video and try to calculate the average power draw from BMS and compare it against the average power from home trainer. I believe that the differences would be small. But definitely the lower values like 14 are not optimal for the efficiency.
The fluctuations are still there but I've only noticed them after running the test with high load for a while.
I also did a few kms commute. The jerkiness is still there. The assistance doesn't seem to be smooth. It works but the motor gives that "jerky" feeling. I haven't tried different modes. I only used hybrid. It's possible that it's caused by the old config with the torque sensor calibration that I used. If I have some spare time I will try the default config and see if there's any difference.
Please note that getting a current of 22A is not necessary a good thing. In fact it could be that the motor has low efficiency (due to non optimal synchronization of the rotation of the magnetic flux). When synchronization is not good, the motor consumes more for the same effective power.
In version 13, I hardcoded a parameter called FOC multiplier on a value = 14. I expected this would be good but the tests made by ebikestuff on the video with a home trainer seems to indicate that the value should be much higher (he get highier rpm with lower Amp).

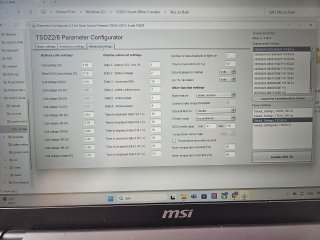
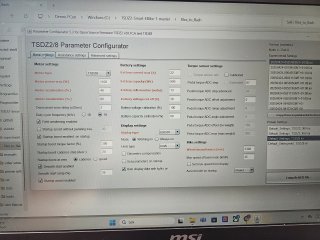
") yesterday I checked src and saw that the Foc value is set to 14, I tested it a bit by changing the acc and dec (50 and 50) in java cfg and it works, testing it on the bike in the field, in power mode works q8very well without any jerks and engine surges also at lower revs, at low rpm it was also ok, the throttle works ok. and generally my feelings after the ride are very positive, I would even say that acc and dec 50, 22A, 1200W, pwr mode with field weakning and startboost supports too much when starting and I will probably eventually reduce it so as not to overload the engine and transmission too much. I wonder if ebikestuff will have any problems in power mode, I will test other modes myself and let you know, I will also check the energy consumption because I have such an option in the ammeter. The hex file is generated in the latest version of the Mbrus software because there were problems in the older one, maybe this is the reason for the engine fluctuation in ebikestuff.
yesterday I checked src and saw that the Foc value is set to 14, I tested it a bit by changing the acc and dec (50 and 50) in java cfg and it works, testing it on the bike in the field, in power mode works q8very well without any jerks and engine surges also at lower revs, at low rpm it was also ok, the throttle works ok. and generally my feelings after the ride are very positive, I would even say that acc and dec 50, 22A, 1200W, pwr mode with field weakning and startboost supports too much when starting and I will probably eventually reduce it so as not to overload the engine and transmission too much. I wonder if ebikestuff will have any problems in power mode, I will test other modes myself and let you know, I will also check the energy consumption because I have such an option in the ammeter. The hex file is generated in the latest version of the Mbrus software because there were problems in the older one, maybe this is the reason for the engine fluctuation in ebikestuff.