leoms
1 mW
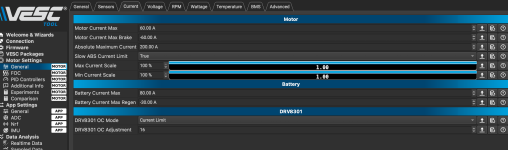
I use a Flipsky 75100 ESC with a mid-drive motor on a bike. I have the absolute current limit set to 200A based on ESC specs (with "slow ABS current limit" set true, so it's checking filtered current against the limit). In general my setup never exceeds this limit: motor current is limited to +/-60A, battery discharge limited to 80A (at ~80V). But once in a while I do get absolute current above 200A. The odd thing is that this happens repeatedly when it happens. For several seconds after the first fault, almost any acceleration results in the ESC cutting for exceeding the limit. I haven't fully investigated what gets it to stop but it's some combination of waiting a few moments and restarting the ESC. This has always happens at low speeds. It does not seem to result from the high speed or high total power output (i.e. fairly high speed full throttle). It's possible it's correlated with high motor current (low speed full throttle) but often I can gun it at low speed and there's no problem.
Any guesses or debugging tips? Or more info that would help? Thank you so much in advance!
-Leo
Any guesses or debugging tips? Or more info that would help? Thank you so much in advance!
-Leo