
whitepony said:randyc1 said:So what happens when board flexes ?,....the middle of board touches and those rubber spacers at the ends Compress to compensate ?? ....suprised there was enough room for them .
when the board flexes, the underside middle region of the board will apply some pressure on the battery (protected by thin felt sheet), the battery will direct that into the case (which is stiff and cannot flex = the battery cannot flex), which then extends the rubber tubes a little to give the board more room.
the rubber tubes extend quite easily, its hardly affecting board flex at all. they come in thicker versions too, like 1.5 x 2cm which are quite a bit harder to extend. alone to protect the battery, its needed that they can extend without much force.
*edit: pic for clarity
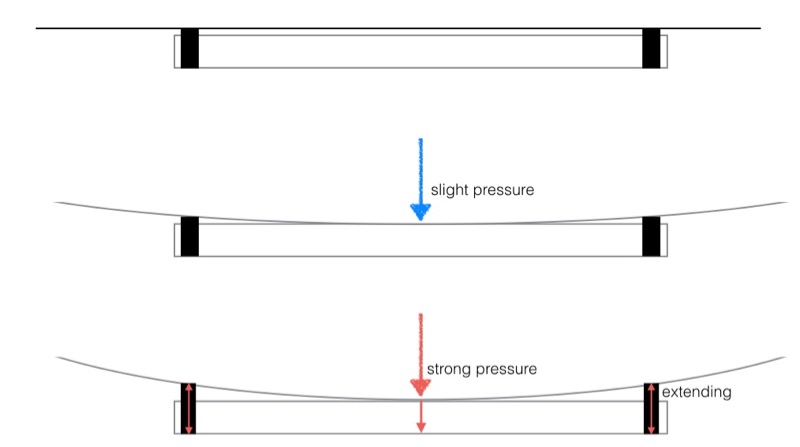
Nice diagram !,.... that's exactly what i thought. Wonder if the underboard hits the battery first or the Alum Angle's edge ?
...I think i will try your enclosure on my board !

