I see posts frequently that state that a smaller diameter wheel develops more torque. Now that my 24" rim arrived, and since looks pretty good sitting next to my new Leaf hub, I'm going to go ahead with relacing the wheel. Playing with the simulator before made me hesitate, since the gains were not major going from 26" to 24", but since it's less than 2mph loss speed-wise, the small advantages would still be nice to have.
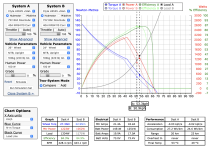
Here's what seems odd. I have the Grin simulator set up for my bike, comparing both wheels, all else being equal. At full throttle, at every speed up to top speed, the 26" has more torque, by a small margin around 5%-6%. However, also at full throttle, the acceleration of the 24" wheel is quicker, by the same margin (leaving throttle auto unchecked, then moving the sliders for each to the same speeds).
To me, it makes sense that the smaller diameter wheel will accelerate faster, but I didn't expect the torque to change in the opposite direction.
The 24" wheel has 5%-6% quicker acceleration all the way up to 34mph, where the torque curve drops off, so not a whole lot, but for most of its range. Still, people put tons of money into cars just to get another 5% back in performance, so I'm doing the swap once I decide on a tire and get it ordered. Any explanations or theories about the effect on torque and acceleration from changing wheel diameter that the simulator is displaying?
https://ebikes.ca/tools/simulator.html?motor=Leaf%205T&batt=cust_72_0.05_24&cont=cust_70_200_0.03_V&hp=0&axis=mph&frame=mountain&autothrot=false&throt=100&grade=0&bopen=true&cont_b=cust_70_200_0.03_V&motor_b=Leaf%205T&batt_b=cust_72_0.05_24&hp_b=0&wheel_b=24i&grade_b=0&autothrot_b=false&throt_b=100

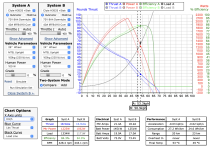
Here's what seems odd. I have the Grin simulator set up for my bike, comparing both wheels, all else being equal. At full throttle, at every speed up to top speed, the 26" has more torque, by a small margin around 5%-6%. However, also at full throttle, the acceleration of the 24" wheel is quicker, by the same margin (leaving throttle auto unchecked, then moving the sliders for each to the same speeds).
To me, it makes sense that the smaller diameter wheel will accelerate faster, but I didn't expect the torque to change in the opposite direction.
The 24" wheel has 5%-6% quicker acceleration all the way up to 34mph, where the torque curve drops off, so not a whole lot, but for most of its range. Still, people put tons of money into cars just to get another 5% back in performance, so I'm doing the swap once I decide on a tire and get it ordered. Any explanations or theories about the effect on torque and acceleration from changing wheel diameter that the simulator is displaying?
https://ebikes.ca/tools/simulator.html?motor=Leaf%205T&batt=cust_72_0.05_24&cont=cust_70_200_0.03_V&hp=0&axis=mph&frame=mountain&autothrot=false&throt=100&grade=0&bopen=true&cont_b=cust_70_200_0.03_V&motor_b=Leaf%205T&batt_b=cust_72_0.05_24&hp_b=0&wheel_b=24i&grade_b=0&autothrot_b=false&throt_b=100