
stancecoke
1 MW
Can you describe the meaning of „cogging“ or even better post a video?
regards
stancecoke
regards
stancecoke
j bjork said:But the only ting working on the lcd3 is battery voltage, no speed, no symbols for braking, no battery indicator.
It also seems like changing assist level has no effect. I havent tested on the road, but it works on assist 0 with the wheel in the air.
And it has a delay when I release the trottle before it stops pulling.
")
// see if CRC is ok
if (((ui8_crc ^ 10) == ui8_rx_buffer [5]) || // some versions of CRC LCD5 (??)
((ui8_crc ^ 5) == ui8_rx_buffer [5]) || // CRC LCD3 (tested with KT36/48SVPR, from PSWpower)
((ui8_crc ^ 9) == ui8_rx_buffer [5]) || // CRC LCD5
((ui8_crc ^ 3) == ui8_rx_buffer [5]) || // CRC LCD5 Added display 5 Romanta
((ui8_crc ^ 2) == ui8_rx_buffer [5])) // CRC LCD3
{// see if CRC is ok
if (((ui8_crc ^ 1) == ui8_rx_buffer [5]) || // some versions of CRC LCD5 (??)
((ui8_crc ^ 4) == ui8_rx_buffer [5]) || // CRC LCD3 (tested with KT36/48SVPR, from PSWpower)
((ui8_crc ^ 6) == ui8_rx_buffer [5]) || // CRC LCD5
((ui8_crc ^ 7) == ui8_rx_buffer [5]) || // CRC LCD5 Added display 5 Romanta
((ui8_crc ^ 8) == ui8_rx_buffer [5])) // CRC LCD3
{In the BluOSEC app, the logging works, but the created file is not easy to analyse, as the infos are at different time bases and you have to sort everything first.apple2 said:Does the app logging feature work and how?
j bjork said:And I did blew 40A fuses with maby 20A settings.
Yes, I remember to read in a few sources that current controller is done on PWM fast loop (with PI controllers but in our case we do not have processing power for that) and speed controller (an others like torque sensor, throttle, etc) is done on outer loop, slower, like at 10ms.stancecoke said:Perhaps for that high currents the implementation of casainho with a pure I-fraction control in the fast loop is better.
j bjork said:I did not understand how to get only the display c file, so I downloaded the whole thing. I unzipped and replaced only the display c file, and wrote the firmware again with the tool. But still nothing on the display, did I do something wrong?
j bjork said:It is kind of working now
It seems like it was the undervoltige protection. I lowered it to 50, then this violent cogging stopped. I tested to raise my batt amps to 500 and phase amps to 1200 again, now it works, but i get small vibrations and humming when pulling hard at low speed. I will test some more with the gain P and I, and see if that will help.
j bjork said:I still don´t have any functions on the display,... I tried to change the whole folder of files, not just the display c, but it did´nt make any differens.
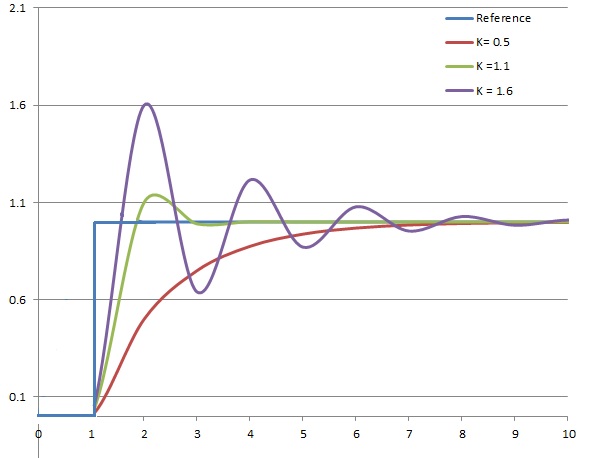
. Gain_I and Gain_P are completely independent. Just play around with both. (You should have in mind, how a PI-Control works...)sascha121985 said:Must I reduce gain P and I at the same time and the same value? So when I go to 0.01 the other value must be 0.04?
sascha121985 said:And again, do you have any idea why assist level 0 at the lcd3 corresponds to level 1 at the java tool?
// convert static defines to volatile vars
ui8_a_s_assistlevels[0] =0;
ui8_a_s_assistlevels[1] =LEVEL_1;
ui8_a_s_assistlevels[2] =LEVEL_2;
ui8_a_s_assistlevels[3] =LEVEL_3;
ui8_a_s_assistlevels[4] =LEVEL_4;
ui8_a_s_assistlevels[5] =LEVEL_5;// >=8 means levels are switched of, use wanted percentage directly instead
ui16_assist_percent_smoothed -= ui16_assist_percent_smoothed >> 4;
if ((ui8_assistlevel_global & 15) < 8) {
ui16_assist_percent_smoothed += ui8_a_s_assistlevels[ui8_assistlevel_global & 15];
} else {
ui16_assist_percent_smoothed += ui8_assist_percent_wanted;
}
ui8_assist_percent_actual = ui16_assist_percent_smoothed >> 4;kkm said:Almosty all “factory” firmware (including KT original fw) uses “speed (rpm) control”, and not “torque (current) control” for the throttle. That is, by shifting the knob on 2-3 mm, the motor (unloaded wheel) turns will be 5-10 rpm, moving another 1 mm - 30-50 rpm, etc.j bjork said:A question, how is the trottle response compeared to the standard fw? I think it is a bit slow on the kt fw.
This behavior allows you to stably maintain the desired speed, especially at low speeds (5-8 km / h), the current speed depends little on small changes in the terrain, it is stable.
And yes, this mode feels like a "quick response" knob.
Unfortunately, this firmware uses a "dumb" throttle control method - "Torgue (current)". An unloaded wheel immediately starts at full speed, driving at low speeds is difficult and unstable, the throttle response is perceived as "viscous", and the acceleration speed and speed change is unpredictable even with slight inclines/rises of 0.5-1 degrees.
Unfortunately, this is the only reason why I cannot use this excellent firmware.
sorry, I don't know this excel-sheet. I think Casainho took the SVM-lookup-table somewhere from the internet. But you can easily calculate the duty cycles for the three phases from the rotor angle, there are many examples in the internet. You can look at my recent Lishui project at github, there are all necessary calculations for FOC implemented.haiyi911 said:do you konw how to derive the formula
I don't know, how the stock firmware implements temperature sensing. We do it with the analog input on connector X4.Blik86 said:How to check supports stock controller sensor temperature of the motor?
For use with our open source firmware it is described in the wiki. For use with the original KT-App, I don't know. I only know, that the KT-App is really poor.florkk said:hello, it is possible to make bluetooth dongle for kt foc controller
haiyi911 said:on the road when i turn the throttle to the end,the motor may take a 3-4 seconds and increase slowly to the max speed,not a quick response.do you?
wrobi said:I disassembled for make some pic, attached below.