
j bjork
1 MW
Tomorrow I will torture it on the track. I tried a little today, and I think it is lacking "punch" as it is. I suppose missing a few 100:s of phase amps might have that effect
")
It is quite possible that it was in the transition that it happened, it was at rather low speed.I wonder if the controller issue is the somewhat common overcurrent fault when transitioning from sensored to sensorless? I know this is being worked on with the next VESC versions but I don't know if it's fixed yet. For me the result of this issue is always if I turn the pA up too high and then apply full throttle when it's still in sensored mode it will overcurrent fault in the transition and the realtime log show as much. I was however able to turn the pA up quite a lot by tuning some settings (and not just cranking the absolute max current to the moon).
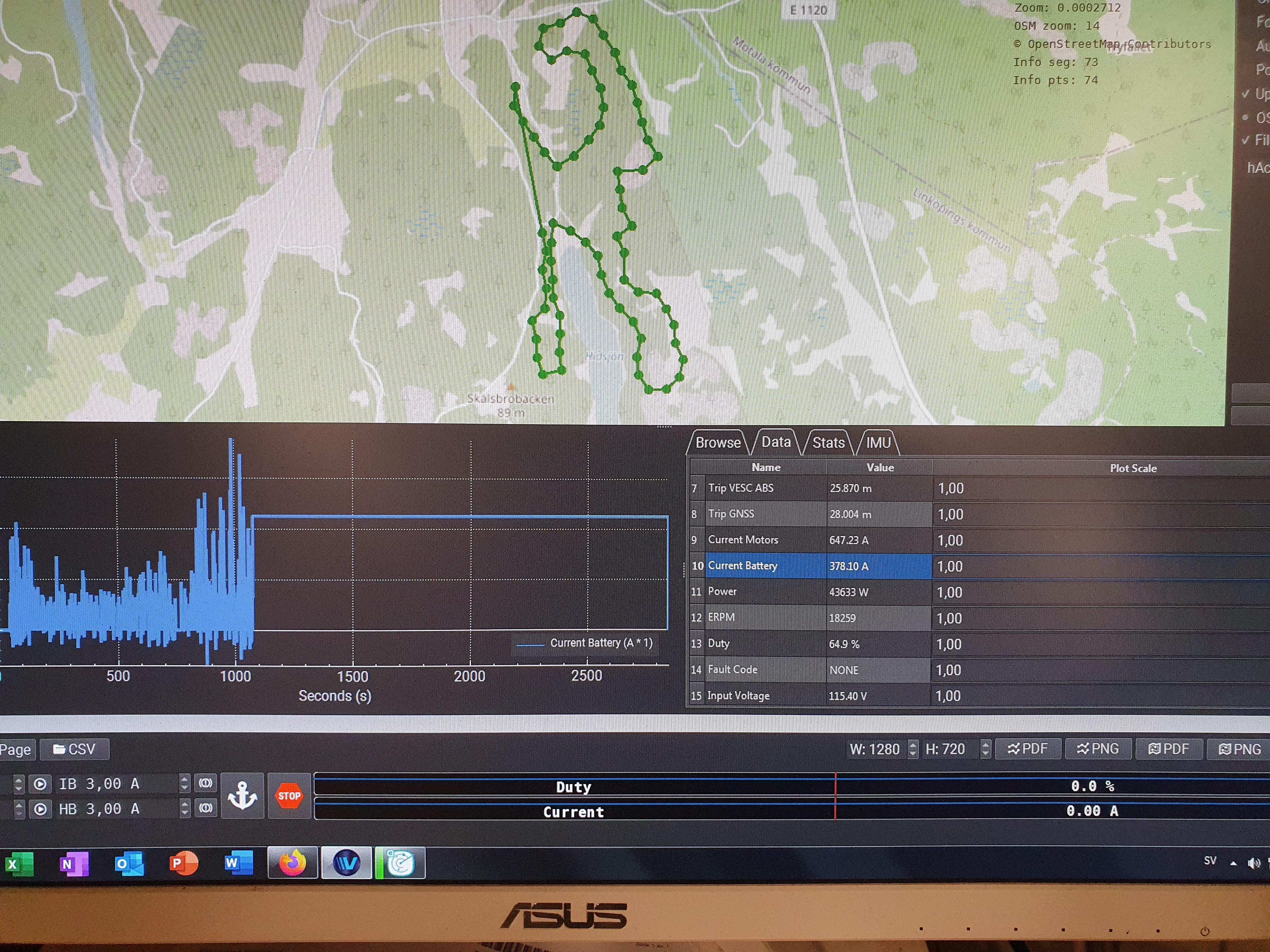


Unfortunately no, the logs were the issue becomes very obvious at the ones where you tell it to capture a very short bit of data to it's internal memory and then you download it later. You can set the trigger to record right before a fault code, so an overcurrent fault. It's a bit of a pain but the result is you see the perfect sine waves and then a hiccup where they don't match.Can you read the realtime logs after a ride, or do you need to catch it on the computer when it happens?
Oh not at all, I was just pointing out that that is a solution but not a very good one as setting the absolute max current, which is the one that triggers the overcurrent fault and cuts the power will just tell it to ignore the issue even though it's still happening.I wouldent call wanting over 1000pA as max limit on a 1400pA controller "cranking the absolute max current to the moon"
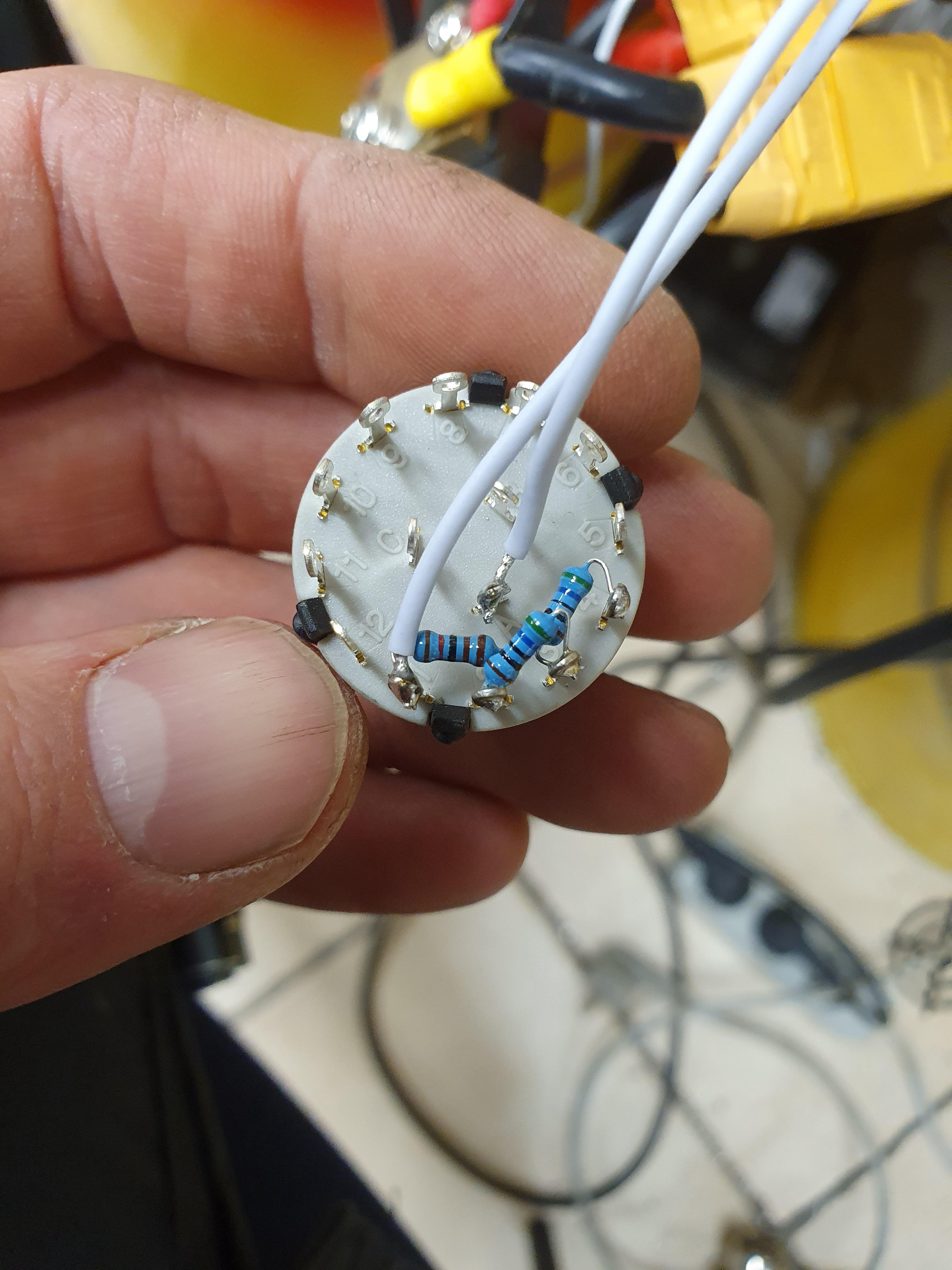
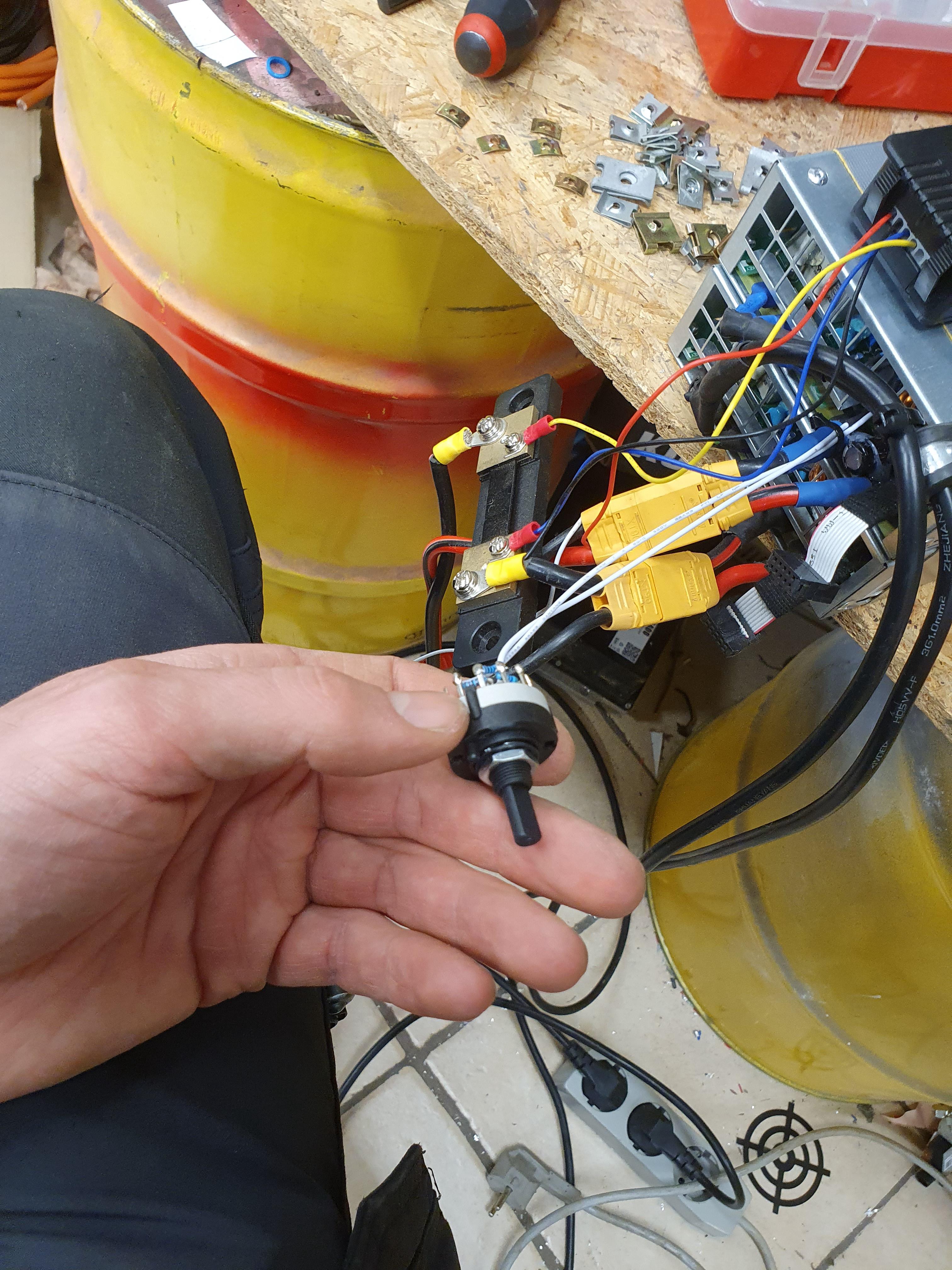







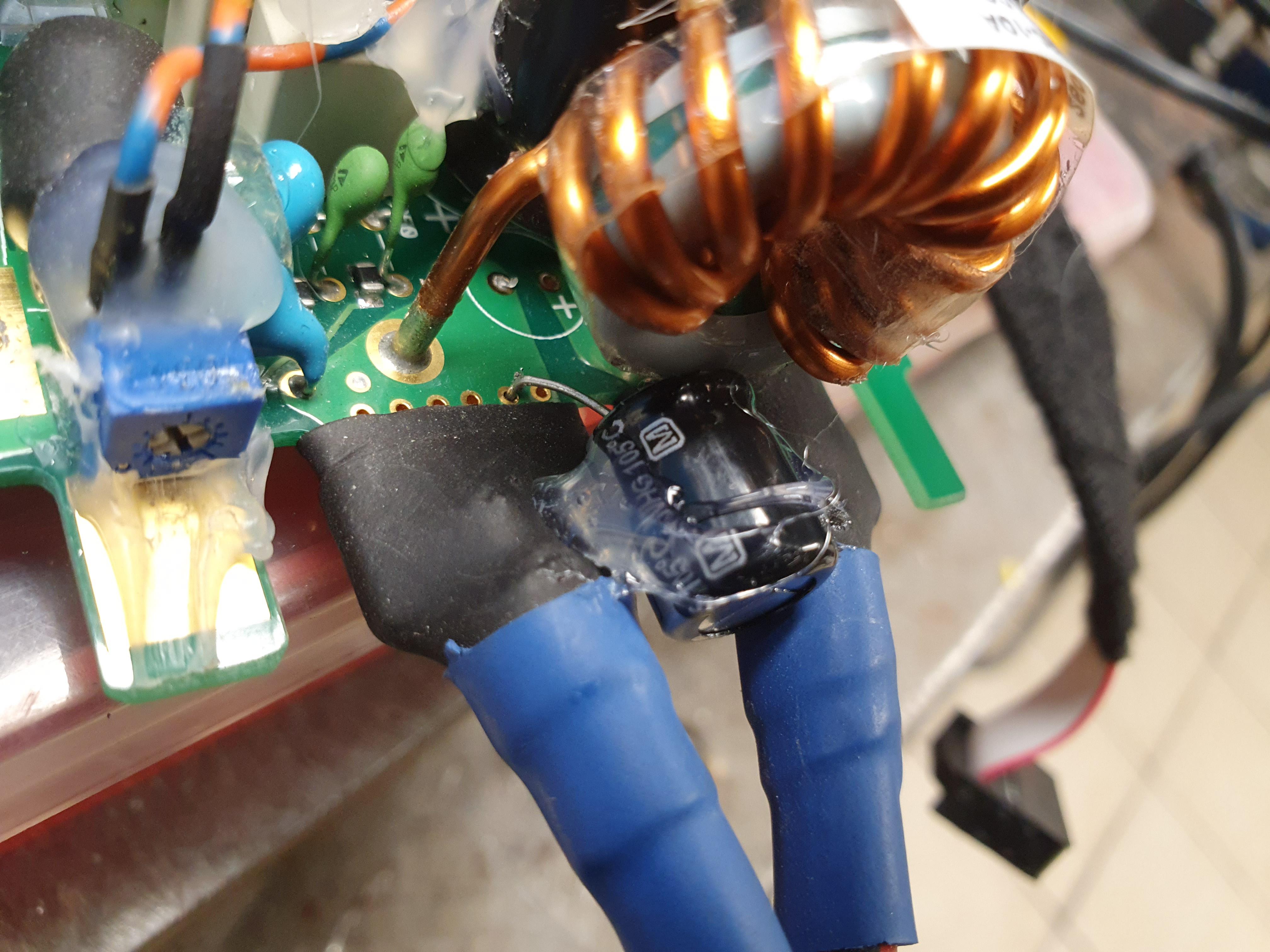
After seeing the somewhat poor craftsmanship on it's exterior I'm not so sure I would be happy seeing it's internals for the price he's asking. I have got in contact with him but his date to follow up has been left with no response like you menetion. I'm thinking a different controller might be the prudent option considering it doesn't seem like the 1400 is even capable of 1400A without jumping through hoops.The 3 shul (vesc) sure is more sofisticated than the fardriver, but I think it should have more inputs and outputs. Also the quality is a bit questionable. You will probably have very quick and direct support if you have simple questions. If it involves some work from Hackeys side, you will probably get a response that he will fix it tomorrow, but weeks later you are still waiting.
