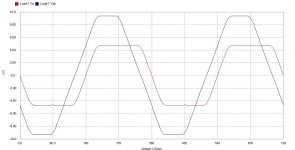
The7 said:maxwell said:The Crystalyte 400 series has a remarkably trapezoidal BEMF as it uses windings that span 3 slots (the phases are spaced one slot) with magnets that span three slots (per pole), those slots are also skewed 1 slot pitch making it even better. Next time I get a rig on my bench I will take some voltage and current waveforms.
Thanks for tell us the distribution of the windings of X400 motors.
This construction would give an trapezoidal Back emf.
Grateful if you post its back emf waveforms when available.
Any back emf wavform for X-motors.