
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
New "TSDZ2 Torque Sensor Central Motor"
- Thread starter larsottar
- Start date

Waynemarlow
10 kW
I know gas motors like a bit of flywheel effect to smooth things out, but do electric engines need flywheel effect ?
I wonder if there was any feedback from the guy who machined the pictured gear ?
I wonder if there was any feedback from the guy who machined the pictured gear ?
RicMcK said:sysrq said:Not in Europe then.RicMcK said:sysrq said:What about the price of the Loctite 660 and being able to remove the parts again. Seems like the price doesn't outweight the benefit in this case. Not sure about angular and radial misalignment.
The loctite 660 is cheep (very small tube, $8USD -Amazon). I figure I will rig up a puller (with an extra spider) to remove the sparg clutch, if and when I need to. I would rather have it tight and not wear the shaft.
https://www.amazon.co.uk/Loctite-Henkel-Quickmetal-Large-Retainer/dp/B002UNNTZ8
OUCHThere are other options that you can probably find locally at a better price.
Could try locktite 641, although the specified gap fill is only 0.1mm for this one. https://www.henkel-adhesives.com/uk/en/product/retaining-compounds/loctite_641.html
CatfishMan
1 mW
- Joined
- Jul 19, 2019
- Messages
- 15
So I just went for a relatively short 8 or so mile ride, mostly flat, but there is a pretty long hill coming back. I have the custom firmware and keep my power max at 450. Going up the hill, I did have the PAS on the highest setting. I noticed when I got back the motor was warm/borderline hot to the touch. Is that normal or did I push it too far? Are there "best practices" to keep the motor from overheating? Is even 450w not safe enough?
There is no way to tell by hand since thermal conductivity of air is 0.022 W/mk. Probably the best option is to wait while theyCatfishMan said:So I just went for a relatively short 8 or so mile ride, mostly flat, but there is a pretty long hill coming back. I have the custom firmware and keep my power max at 450. Going up the hill, I did have the PAS on the highest setting. I noticed when I got back the motor was warm/borderline hot to the touch. Is that normal or did I push it too far? Are there "best practices" to keep the motor from overheating? Is even 450w not safe enough?
http://www.tsbicycle.net/index.php/about/63
improve the thermal management. If they use magnets with higher Curie temperature then there is less reason for thermal management.
https://endless-sphere.com/forums/viewtopic.php?f=28&t=102046&p=1497028#p1497028
Retrorockit
1 kW
Gas engines need a flywheel to carry through between the power stroke, and the intake exhaust and compression strokes. the fewer cylinders the more flywheel needed. Electric motors have a more continuos torque out put and even produce torque at 0 rpm. Also the rotating parts of an electric motor are already heavy, and being circular in profile tend to be evenly balanced. One example of the gas engines without a flywheel were the very early 2 stroke radial aircraft engines. The crankshaft was bolted to the airframe, and the whole engine block spun with the propeller attached to it, saving the weight of a separate flywheel.Waynemarlow said:I know gas motors like a bit of flywheel effect to smooth things out, but do electric engines need flywheel effect ?
I wonder if there was any feedback from the guy who machined the pictured gear ?
Always good reasons to operate BLDC motors at lower temperatures. As the temperature increases so does the winding resistance. A 50C temperature increases the winding resistance by 20%. At too high a temperature the rotor magnets can be demagnetised (this has been experienced and documented on this forum for the TSDZ2). Also motors have been burned (potentially the winding insulation breaking down) at high temperatures.sysrq said:There is no way to tell by hand since thermal conductivity of air is 0.022 W/mk. Probably the best option is to wait while theyCatfishMan said:So I just went for a relatively short 8 or so mile ride, mostly flat, but there is a pretty long hill coming back. I have the custom firmware and keep my power max at 450. Going up the hill, I did have the PAS on the highest setting. I noticed when I got back the motor was warm/borderline hot to the touch. Is that normal or did I push it too far? Are there "best practices" to keep the motor from overheating? Is even 450w not safe enough?
http://www.tsbicycle.net/index.php/about/63
improve the thermal management. If they use magnets with higher Curie temperature then there is less reason for thermal management.
https://endless-sphere.com/forums/viewtopic.php?f=28&t=102046&p=1497028#p1497028
Also better to operate at lower RPMS, which decreases the loses in the core (hysteresis and eddy current losses), and less so windage and friction losses. Core losses are significant.
Is there any literature on the rated torque of the motor(s) in the TSDZ2?
mctubster said:Always good reasons to operate BLDC motors at lower temperatures. As the temperature increases so does the winding resistance. A 50C temperature increases the winding resistance by 20%. At too high a temperature the rotor magnets can be demagnetised (this has been experienced and documented on this forum for the TSDZ2). Also motors have been burned (potentially the winding insulation breaking down) at high temperatures.sysrq said:There is no way to tell by hand since thermal conductivity of air is 0.022 W/mk. Probably the best option is to wait while theyCatfishMan said:So I just went for a relatively short 8 or so mile ride, mostly flat, but there is a pretty long hill coming back. I have the custom firmware and keep my power max at 450. Going up the hill, I did have the PAS on the highest setting. I noticed when I got back the motor was warm/borderline hot to the touch. Is that normal or did I push it too far? Are there "best practices" to keep the motor from overheating? Is even 450w not safe enough?
http://www.tsbicycle.net/index.php/about/63
improve the thermal management. If they use magnets with higher Curie temperature then there is less reason for thermal management.
https://endless-sphere.com/forums/viewtopic.php?f=28&t=102046&p=1497028#p1497028
Also better to operate at lower RPMS, which decreases the loses in the core (hysteresis and eddy current losses), and less so windage and friction losses. Core losses are significant.
Is there any literature on the rated torque of the motor(s) in the TSDZ2?
Agreed, there was a link about thermal management performance benefits for BLDC motors in this https://endless-sphere.com/forums/viewtopic.php?f=28&t=102046&p=1497028#p1497028
thread. There just isn't much average user can do in this case.
Seems like wide range cassette with closely spaced gears is one of the things that could help the motor RPM's from being too high or too low while reducing the temperature rise. Hard to find anything about recommended gear steps for each mid drive motor.
ImpulsePurchase
10 mW
- Joined
- Jul 4, 2017
- Messages
- 26
Sorry if this has already been put to bed (but with 235 pages its a little difficult to find now) - but does the open firmware fix high default torque sensor settings?
I have a brand new TSDZ2 and the unloaded setting (menu under TE) is about 117 (a web search has suggested 75 seems a more normal default). Consequently I don't seem to be able to keep the motor engaged and its useless as a motor (can't notice the difference between off and turbo mode). I was intending on loading the open source firmware anyway as soon as the cables arrive, but not sure if this is permanently borked and I need to suck up the cost of international returns or if I can work around it?
Thanks
I have a brand new TSDZ2 and the unloaded setting (menu under TE) is about 117 (a web search has suggested 75 seems a more normal default). Consequently I don't seem to be able to keep the motor engaged and its useless as a motor (can't notice the difference between off and turbo mode). I was intending on loading the open source firmware anyway as soon as the cables arrive, but not sure if this is permanently borked and I need to suck up the cost of international returns or if I can work around it?
Thanks
Please read this page and consider if you are upto doing this?ImpulsePurchase said:Sorry if this has already been put to bed (but with 235 pages its a little difficult to find now) - but does the open firmware fix high default torque sensor settings?
I have a brand new TSDZ2 and the unloaded setting (menu under TE) is about 117 (a web search has suggested 75 seems a more normal default). Consequently I don't seem to be able to keep the motor engaged and its useless as a motor (can't notice the difference between off and turbo mode). I was intending on loading the open source firmware anyway as soon as the cables arrive, but not sure if this is permanently borked and I need to suck up the cost of international returns or if I can work around it?
Thanks
https://github.com/OpenSource-EBike-firmware/TSDZ2_wiki/wiki/How-to-calibrate-the-torque-sensor
ImpulsePurchase
10 mW
- Joined
- Jul 4, 2017
- Messages
- 26
mctubster said:Please read this page and consider if you are upto doing this?ImpulsePurchase said:Sorry if this has already been put to bed (but with 235 pages its a little difficult to find now) - but does the open firmware fix high default torque sensor settings?
I have a brand new TSDZ2 and the unloaded setting (menu under TE) is about 117 (a web search has suggested 75 seems a more normal default). Consequently I don't seem to be able to keep the motor engaged and its useless as a motor (can't notice the difference between off and turbo mode). I was intending on loading the open source firmware anyway as soon as the cables arrive, but not sure if this is permanently borked and I need to suck up the cost of international returns or if I can work around it?
Thanks
https://github.com/OpenSource-EBike-firmware/TSDZ2_wiki/wiki/How-to-calibrate-the-torque-sensor
Thank you! It looks like the answer is - not directly but it is possible by disassembling and adjusting. Reading through it looks like you need the open firmware in order to get the minimum value ranges which we don't have for the stock firmware.
Magic fairies seem to have gone in overnight to get something working (I enabled the walk mode and lifted the wheel to test and then it started to work afterwards). The stock firmware is showing a lower reading for TE/rE (107) now so not sure whats changed there. Still not consistently working (second trip I had to stop twice to power off and restart (same process of aligning pedals to horizontal and not touching them each time) to get the motor to engage) so something isn't quite right but once its working it seems to stay working.
If I can get it consistently starting I'll probably leave adjusting the torque sensor until I do a service at some point.
Is the speed registering correctly? Try riding even without assistance to check. The gap between the magnet and sensor needs to larger than you would expect. Say 5mm or 1/5 inch.ImpulsePurchase said:Magic fairies seem to have gone in overnight to get something working (I enabled the walk mode and lifted the wheel to test and then it started to work afterwards). The stock firmware is showing a lower reading for TE/rE (107) now so not sure whats changed there. Still not consistently working (second trip I had to stop twice to power off and restart (same process of aligning pedals to horizontal and not touching them each time) to get the motor to engage) so something isn't quite right but once its working it seems to stay working.
If I can get it consistently starting I'll probably leave adjusting the torque sensor until I do a service at some point.
ImpulsePurchase
10 mW
- Joined
- Jul 4, 2017
- Messages
- 26
mctubster said:Is the speed registering correctly? Try riding even without assistance to check. The gap between the magnet and sensor needs to larger than you would expect. Say 5mm or 1/5 inch.ImpulsePurchase said:Magic fairies seem to have gone in overnight to get something working (I enabled the walk mode and lifted the wheel to test and then it started to work afterwards). The stock firmware is showing a lower reading for TE/rE (107) now so not sure whats changed there. Still not consistently working (second trip I had to stop twice to power off and restart (same process of aligning pedals to horizontal and not touching them each time) to get the motor to engage) so something isn't quite right but once its working it seems to stay working.
If I can get it consistently starting I'll probably leave adjusting the torque sensor until I do a service at some point.
No problems with the speedo. Reads rock steady without jumping around (though I need to calibrate properly for wheel size as I'm fairly sure its over-reading). I shimmed the sensor closer to the wheel using a pencil to get the gap down to about 5mm as I have disc brakes, although it was still reading solidly without this but better to remove all the possible errors. I'm going to change the battery connectors at some point just to make sure its not a dodgy connection there - as I currently have bullet connectors. I'm having a positive experience when its working though. Much more cycle like than anything else I have previously tried.
ImpulsePurchase
10 mW
- Joined
- Jul 4, 2017
- Messages
- 26
Okay. I think I have figured out why I only sometimes get power. It seems that if I power on at different crank alignments I get different base torque sensor readings and as I rotate the cranks then the base level changes. In my earlier testing my max rE1 I could get by standing on the pedals was about 130 so if my base level was 120 and half way round I'm getting a -10 reading then I can't push hard enough to engage the motor.
I did a video here (sorry its vertical) showing the rE1 settings at different crank settings without any load applied.
[youtube]V3ogs4TPS8Q[/youtube]
This could be something in the way I have installed it? Maybe something not quite square but I can't think what. Any ideas?
I did a video here (sorry its vertical) showing the rE1 settings at different crank settings without any load applied.
[youtube]V3ogs4TPS8Q[/youtube]
This could be something in the way I have installed it? Maybe something not quite square but I can't think what. Any ideas?
knutselmaaster
1 kW
Try removing the crank arms and install them 90° further.ImpulsePurchase said:Okay. I think I have figured out why I only sometimes get power. It seems that if I power on at different crank alignments I get different base torque sensor readings and as I rotate the cranks then the base level changes. In my earlier testing my max rE1 I could get by standing on the pedals was about 130 so if my base level was 120 and half way round I'm getting a -10 reading then I can't push hard enough to engage the motor.
I did a video here (sorry its vertical) showing the rE1 settings at different crank settings without any load applied.
[youtube]V3ogs4TPS8Q[/youtube]
This could be something in the way I have installed it? Maybe something not quite square but I can't think what. Any ideas?
Normally this shouldn't matter but maybe it helps in your case.
By the way, could you please tell me how to reach that menu option?
ImpulsePurchase
10 mW
- Joined
- Jul 4, 2017
- Messages
- 26
You can get into the menu for the torque settings by holding the ? And power button for 10 seconds (like the standard option menu but for longer). I'm assuming you have the vlcd5 display here.
I read that you have to go into the menu within a certain time of turning on but I'm not certain. I know I don't seem to be able to get in if I accidentally end up in the standard options menu first (always end up turning the system off by accident)
Will try turning the cranks. Was going to measure the settings without any cranks to see if that makes a difference anyway.
I read that you have to go into the menu within a certain time of turning on but I'm not certain. I know I don't seem to be able to get in if I accidentally end up in the standard options menu first (always end up turning the system off by accident)
Will try turning the cranks. Was going to measure the settings without any cranks to see if that makes a difference anyway.
@ImpulsePurchase
Maybe the stationary coil is not positioned/aligned correctly in regards with rotary coil, over the whole crank rotation. Maybe one of the 3 light springs is out of place or the stationary coil is bent. I have a slight variation of ADC torque reading of about 1-2 units over one complete crank revolution, I guess it's normal.
Maybe the stationary coil is not positioned/aligned correctly in regards with rotary coil, over the whole crank rotation. Maybe one of the 3 light springs is out of place or the stationary coil is bent. I have a slight variation of ADC torque reading of about 1-2 units over one complete crank revolution, I guess it's normal.
ImpulsePurchase
10 mW
- Joined
- Jul 4, 2017
- Messages
- 26
cream said:@ImpulsePurchase
Maybe the stationary coil is not positioned/aligned correctly in regards with rotary coil, over the whole crank rotation. Maybe one of the 3 light springs is out of place or the stationary coil is bent. I have a slight variation of ADC torque reading of about 1-2 units over one complete crank revolution, I guess it's normal.
Thanks for the suggestion. It is starting to look like something like that. Was hoping to avoid taking the whole unit apart at this point as it only turned up a week ago and although the process looks within my capabilities I'm not as time rich as I was a year ago.
Was looking to go through enough diagnosis to help the seller determine if its better to swap for a good one or not.
Just ordered one, yay! (also ordered the sw102, StLink, and LM35 temp sensor)
Are the brake switches normally open, and closed when the brakes are pressed, or is it the other way around? (I assume it's the same for both the stock levers and magnetic ones). Might want to do something Diy instead of buying the Bafang ones.
Also, do I need to regrease the motor when I get it? Will be using the blue gear for now, but will order the metal one at some point.
I already have this grease they say it's lithium with Teflon additive. Would this be bad for the blue gear?
Are the brake switches normally open, and closed when the brakes are pressed, or is it the other way around? (I assume it's the same for both the stock levers and magnetic ones). Might want to do something Diy instead of buying the Bafang ones.
Also, do I need to regrease the motor when I get it? Will be using the blue gear for now, but will order the metal one at some point.
I already have this grease they say it's lithium with Teflon additive. Would this be bad for the blue gear?
Aquakitty
100 W
- Joined
- Jun 10, 2017
- Messages
- 179
TL;DR: Anything obvious/fixable that could cause a display to blow?
Ok this is a weird one. I think I somehow blew one of my KT-LCD3 displays. I had one motor left to do the open source firmware mod to so decided I had the time to do it and wired it as usual. The only difference this time is I soldered 3 wires for the temp sensor, but that shouldn't have any effect since the only wire involved in the LCD is the ground wire.
However now the LCD won't turn on. I d/c'd it all and tested it by just adding 5v from the ST-Link V2, and no go. It does not show numbers/letters.
I know this is a long shot but any idea what could have blown on this thing? Physically, the board looks fine. No scorch marks. Nothing obviously blown. I've ruined a laptop LCD in the past with static but that time I actually saw an arc. Nothing visibly wrong with anything.
I suppose the most likely is I swapped the red and blue wires, but that wouldn't cause anything to blow, would it? Since both are designed to hold voltage?
I've already ordered a couple Sw102's to upgrade at any rate.
Ok this is a weird one. I think I somehow blew one of my KT-LCD3 displays. I had one motor left to do the open source firmware mod to so decided I had the time to do it and wired it as usual. The only difference this time is I soldered 3 wires for the temp sensor, but that shouldn't have any effect since the only wire involved in the LCD is the ground wire.
However now the LCD won't turn on. I d/c'd it all and tested it by just adding 5v from the ST-Link V2, and no go. It does not show numbers/letters.
I know this is a long shot but any idea what could have blown on this thing? Physically, the board looks fine. No scorch marks. Nothing obviously blown. I've ruined a laptop LCD in the past with static but that time I actually saw an arc. Nothing visibly wrong with anything.
I suppose the most likely is I swapped the red and blue wires, but that wouldn't cause anything to blow, would it? Since both are designed to hold voltage?
I've already ordered a couple Sw102's to upgrade at any rate.
I do not know if someone already wrote about the influence of driving style on the efficiency of energy consumption, but I think it is quite interesting. We do not know the characteristics of the TSDZ2 motor. I reviewed several characteristics charts of BLDC motors. All of them have the highest efficiency close to maximum speed. The lower the motor rpm, the lower the efficiency, and hence the more heat. Look at an example chart:
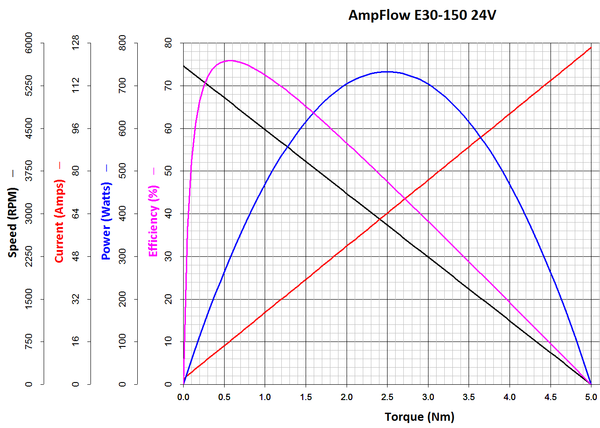
This motor has the 75% efficiency close to maximum rpm. But in half of the nominal rpm (where it obtains the highest power), its efficiency is below 50%. So more than half the power is wasted in the form of heat. It's a lot. Just imagine that half the energy from your battery is lost. This problem is particularly evident in hub motors, which often run at low speeds. They get hot fast.
We can not improve the efficiency of the TSDZ2 motor. Fortunately, the mid drives have the advantage that you can shift into a lower gear and thus increase the cadence and motor rpm. Then the energy is used more efficiently, less heat is generated, and the bike's range is much greater. All in all if your motor temperature is getting high, or you want to save energy, riding with a high cadence should help.
This motor has the 75% efficiency close to maximum rpm. But in half of the nominal rpm (where it obtains the highest power), its efficiency is below 50%. So more than half the power is wasted in the form of heat. It's a lot. Just imagine that half the energy from your battery is lost. This problem is particularly evident in hub motors, which often run at low speeds. They get hot fast.
We can not improve the efficiency of the TSDZ2 motor. Fortunately, the mid drives have the advantage that you can shift into a lower gear and thus increase the cadence and motor rpm. Then the energy is used more efficiently, less heat is generated, and the bike's range is much greater. All in all if your motor temperature is getting high, or you want to save energy, riding with a high cadence should help.
knutselmaaster
1 kW
You're absolutely right. Too low cadence is the main cause of problems, complaints and premature wear for mid motors.
Manufacturers tell everybody in their marketing that mid motors are way better than hub motors because they, so they say, always run in optimal speed.
In reality, it all depends on the driver, if he doesn't change gears according to the speed and climb, there is no difference between hub and mid motors.
And you'd be amazed to see how many mid motor users don't even shift gears at all.
Manufacturers tell everybody in their marketing that mid motors are way better than hub motors because they, so they say, always run in optimal speed.
In reality, it all depends on the driver, if he doesn't change gears according to the speed and climb, there is no difference between hub and mid motors.
And you'd be amazed to see how many mid motor users don't even shift gears at all.
Retrorockit
1 kW
In my riding environment where 30+ mph is required some times, peak power at 3000 RPM looks interesting.najbyk said:I do not know if someone already wrote about the influence of driving style on the efficiency of energy consumption, but I think it is quite interesting. We do not know the characteristics of the TSDZ2 motor. I reviewed several characteristics charts of BLDC motors. All of them have the highest efficiency close to maximum speed. The lower the motor rpm, the lower the efficiency, and hence the more heat. Look at an example chart:
This motor has the 75% efficiency close to maximum rpm. But in half of the nominal rpm (where it obtains the highest power), its efficiency is below 50%. So more than half the power is wasted in the form of heat. It's a lot. Just imagine that half the energy from your battery is lost. This problem is particularly evident in hub motors, which often run at low speeds. They get hot fast.
We can not improve the efficiency of the TSDZ2 motor. Fortunately, the mid drives have the advantage that you can shift into a lower gear and thus increase the cadence and motor rpm. Then the energy is used more efficiently, less heat is generated, and the bike's range is much greater. All in all if your motor temperature is getting high, or you want to save energy, riding with a high cadence should help.
As far as efficiency goes gas engines all run at around 30%. 1/3 drives the car,1/3 out the exhaust, and 1/3 lost to the radiator. That's why the 100mpg carburetor will remain a secret. The secret is the carburetor isn't the problem. Turbodiesels probably dream of hitting 50%.
Similar threads
- Replies
- 1
- Views
- 691
- Replies
- 5
- Views
- 2,394

- Replies
- 14
- Views
- 26,722
- Replies
- 1,682
- Views
- 143,345
- Replies
- 23
- Views
- 5,488