1: (266) LaunchOptions<LocalLaunchOptions xmlns='http://schemas.microsoft.com/vstudio/MDDDebuggerOptions/2014'
1: (303) LaunchOptions ExePath='/home/cas/OpenSource-EBike-firmware/TSDZ2_wireless/firmware/_build/TSDZ2_wireless.out'
1: (303) LaunchOptions WorkingDirectory='/home/cas/OpenSource-EBike-firmware/TSDZ2_wireless/firmware'
1: (303) LaunchOptions TargetArchitecture='arm'
1: (303) LaunchOptions ExeArguments=''
1: (303) LaunchOptions MIMode='gdb'
1: (303) LaunchOptions MIDebuggerPath='gdb-multiarch'
1: (303) LaunchOptions WaitDynamicLibLoad='false'
1: (304) LaunchOptions MIDebuggerServerAddress='localhost:3333'
1: (304) LaunchOptions>
1: (304) LaunchOptions <CustomLaunchSetupCommands>
1: (304) LaunchOptions <Command IgnoreFailures='false' Description='Set remote target'>file /home/cas/OpenSource-EBike-firmware/TSDZ2_wireless/firmware/_build/TSDZ2_wireless.out</Command>
1: (304) LaunchOptions <Command IgnoreFailures='false' Description='Set remote target'>target remote localhost:3333</Command>
1: (304) LaunchOptions <Command IgnoreFailures='false' Description=''>monitor init</Command>
1: (304) LaunchOptions <Command IgnoreFailures='false' Description=''>monitor reset init</Command>
1: (304) LaunchOptions <Command IgnoreFailures='false' Description='Flash firmware'>monitor flash write_image erase /home/cas/OpenSource-EBike-firmware/TSDZ2_wireless/firmware/_build/TSDZ2_wireless_with_SD.hex</Command>
1: (304) LaunchOptions <Command IgnoreFailures='false' Description='Start debug'>monitor reset halt</Command>
1: (304) LaunchOptions </CustomLaunchSetupCommands>
1: (305) LaunchOptions</LocalLaunchOptions>
1: (505) Starting: "/usr/bin/gdb-multiarch" --interpreter=mi
1: (541) DebuggerPid=17216
1: (608) ->=thread-group-added,id="i1"
1: (613) ->~"GNU gdb (Ubuntu 9.1-0ubuntu1) 9.1\n"
1: (614) ->~"Copyright (C) 2020 Free Software Foundation, Inc.\n"
1: (615) ->~"License GPLv3+: GNU GPL version 3 or later <http://gnu.org/licenses/gpl.html>\nThis is free software: you are free to change and redistribute it.\nThere is NO WARRANTY, to the extent permitted by law."
1: (615) ->~"\nType \"show copying\" and \"show warranty\" for details.\n"
1: (616) ->~"This GDB was configured as \"x86_64-linux-gnu\".\n"
1: (618) ->~"Type \"show configuration\" for configuration details.\n"
1: (618) ->~"For bug reporting instructions, please see:\n"
1: (618) ->~"<http://www.gnu.org/software/gdb/bugs/>.\n"
1: (618) ->~"Find the GDB manual and other documentation resources online at:\n <http://www.gnu.org/software/gdb/documentation/>."
1: (618) ->~"\n\n"
1: (618) ->~"For help, type \"help\".\n"
1: (618) ->~"Type \"apropos word\" to search for commands related to \"word\".\n"
1: (618) ->(gdb)
1: (626) <-1001-gdb-set target-async on
1: (628) ->1001^done
1: (628) ->(gdb)
1: (631) 1001: elapsed time 6
1: (642) <-1002-interpreter-exec console "set pagination off"
1: (643) ->=cmd-param-changed,param="pagination",value="off"
1: (644) ->1002^done
1: (644) ->(gdb)
1: (645) 1002: elapsed time 2
1: (645) <-1003-gdb-set auto-solib-add on
1: (646) ->1003^done
1: (646) ->(gdb)
1: (646) 1003: elapsed time 0
1: (647) <-1004-gdb-set solib-search-path /home/cas/OpenSource-EBike-firmware/TSDZ2_wireless/firmware/_build:
1: (648) ->1004^done
1: (648) ->(gdb)
1: (648) 1004: elapsed time 1
1: (651) <-1005-interpreter-exec console "file /home/cas/OpenSource-EBike-firmware/TSDZ2_wireless/firmware/_build/TSDZ2_wireless.out"
1: (652) ->~"Reading symbols from /home/cas/OpenSource-EBike-firmware/TSDZ2_wireless/firmware/_build/TSDZ2_wireless.out...\n"
1: (712) ->1005^done
1: (712) ->(gdb)
1: (713) 1005: elapsed time 62
1: (714) <-1006-interpreter-exec console "target remote localhost:3333"
1: (714) ->~"Remote debugging using localhost:3333\n"
1: (717) ->=thread-group-started,id="i1",pid="42000"
1: (717) ->=thread-created,id="1",group-id="i1"
1: (726) ->~"0x000368c6 in main () at ./main.c:150\n"
1: (726) ->~"150\t cnt_2++;\n"
1: (726) ->*stopped,frame={addr="0x000368c6",func="main",args=[],file="./main.c",fullname="/home/cas/OpenSource-EBike-firmware/TSDZ2_wireless/firmware/main.c",line="150",arch="armv7e-m"},thread-id="1",stopped-threads="all"
1: (726) ->1006^done
1: (726) ->(gdb)
1: (739) 1006: elapsed time 25
1: (739) <-1007-thread-info 1
1: (740) ->1007^done,threads=[{id="1",target-id="Remote target",frame={level="0",addr="0x000368c6",func="main",args=[],file="./main.c",fullname="/home/cas/OpenSource-EBike-firmware/TSDZ2_wireless/firmware/main.c",line="150",arch="armv7e-m"},state="stopped"}]
1: (740) ->(gdb)
1: (741) 1007: elapsed time 2
1: (742) <-1008-interpreter-exec console "monitor init"
1: (743) ->1008^done
1: (743) ->(gdb)
1: (745) 1008: elapsed time 3
1: (746) <-1009-interpreter-exec console "monitor reset init"
1: (769) ->@"target halted due to debug-request, current mode: Thread \n"
1: (769) ->@"xPSR: 0x01000000 pc: 0x00000a80 msp: 0x20000400\n"
1: (770) ->1009^done
1: (770) ->(gdb)
1: (770) 1009: elapsed time 24
1: (770) <-1010-interpreter-exec console "monitor flash write_image erase /home/cas/OpenSource-EBike-firmware/TSDZ2_wireless/firmware/_build/TSDZ2_wireless_with_SD.hex"
1: (771) ->@"auto erase enabled\n"
1: (804) ->@"Padding image section 0 with 1280 bytes\n"
1: (805) ->@"Padding image section 1 with 6336 bytes\n"
1: (5818) ->@"using fast async flash loader. This is currently supported\n"
1: (5821) ->@"only with ST-Link and CMSIS-DAP. If you have issues, add\n"
1: (5821) ->@"\"set WORKAREASIZE 0\" before sourcing nrf51.cfg to disable it\n"
1: (7458) ->@"target halted due to breakpoint, current mode: Thread \n"
1: (7460) ->@"xPSR: 0x61000000 pc: 0x2000001e msp: 0x20000400\n"
1: (7461) ->@"wrote 233472 bytes from file /home/cas/OpenSource-EBike-firmware/TSDZ2_wireless/firmware/_build/TSDZ2_wireless_with_SD.hex in 6.684961s (34.106 KiB/s)\n"
1: (7461) ->1010^done
1: (7462) ->(gdb)
1: (7463) 1010: elapsed time 6692
1: (7463) <-1011-interpreter-exec console "monitor reset halt"
1: (7504) ->@"target halted due to debug-request, current mode: Thread \n"
1: (7505) ->@"xPSR: 0x01000000 pc: 0x00000a80 msp: 0x20000400\n"
1: (7506) ->1011^done
1: (7507) 1011: elapsed time 43
1: (7512) ->(gdb)
1: (7556) Send Event AD7EngineCreateEvent
1: (7574) Send Event AD7ProgramCreateEvent
<-- C (setBreakpoints-3): {"command":"setBreakpoints","arguments":{"source":{"name":"main.c","path":"/home/cas/OpenSource-EBike-firmware/TSDZ2_wireless/firmware/main.c"},"lines":[145],"breakpoints":[{"line":145}],"sourceModified":false},"type":"request","seq":3}
1: (7750) <-1012-break-insert -f main.c:145
1: (7752) ->1012^done,bkpt={number="1",type="breakpoint",disp="keep",enabled="y",addr="0x000368b4",func="main",file="./main.c",fullname="/home/cas/OpenSource-EBike-firmware/TSDZ2_wireless/firmware/main.c",line="145",thread-groups=["i1"],times="0",original-location="main.c:145"}
1: (7753) ->(gdb)
1: (7753) 1012: elapsed time 2
1: (7765) <-1013-symbol-list-lines /home/cas/OpenSource-EBike-firmware/TSDZ2_wireless/firmware/main.c
1: (7766) ->1013^done,lines=[{pc="0x0003663c",line="52"},{pc="0x00036648",line="53"},{pc="0x0003664c",line="55"},{pc="0x000367a8",line="91"},{pc="0x000367aa",line="93"},{pc="0x000367b2",line="0"},{pc="0x000367b4",line="96"},{pc="0x000367ba",line="99"},{pc="0x000367c6",line="102"},{pc="0x000367d6",line="105"},{pc="0x000367e6",line="109"},{pc="0x000367f4",line="113"},{pc="0x000367fc",line="114"},{pc="0x0003680c",line="115"},{pc="0x00036828",line="0"},{pc="0x00036828",line="118"},{pc="0x0003682e",line="119"},{pc="0x00036834",line="120"},{pc="0x00036844",line="124"},{pc="0x0003684a",line="125"},{pc="0x0003685a",line="127"},{pc="0x00036862",line="128"},{pc="0x00036872",line="129"},{pc="0x0003687a",line="0"},{pc="0x0003687a",line="132"},{pc="0x00036880",line="133"},{pc="0x0003688c",line="134"},{pc="0x0003689c",line="136"},{pc="0x000368a0",line="137"},{pc="0x000368a8",line="0"},{pc="0x000368a8",line="140"},{pc="0x000368ac",line="143"},{pc="0x000368b0",line="144"},{pc="0x000368b4",line="145"},{pc="0x000368b8",line="149"},{pc="0x000368c4",line="150"},{pc="0x000368d0",line="151"},{pc="0x000368d2",line="153"},{pc="0x000368de",line="149"},{pc="0x000368e8",line="0"}]
1: (7766) ->(gdb)
1: (7767) 1013: elapsed time 2
1: (7772) Send Event AD7BreakpointBoundEvent
<-- C (setFunctionBreakpoints-4): {"command":"setFunctionBreakpoints","arguments":{"breakpoints":[]},"type":"request","seq":4}
<-- C (configurationDone-5): {"command":"configurationDone","type":"request","seq":5}
1: (7919) Send Event AD7LoadCompleteEvent
=thread-group-added,id="i1"
GNU gdb (Ubuntu 9.1-0ubuntu1) 9.1
Copyright (C) 2020 Free Software Foundation, Inc.
License GPLv3+: GNU GPL version 3 or later <http://gnu.org/licenses/gpl.html>
This is free software: you are free to change and redistribute it.
There is NO WARRANTY, to the extent permitted by law.
Type "show copying" and "show warranty" for details.
This GDB was configured as "x86_64-linux-gnu".
Type "show configuration" for configuration details.
For bug reporting instructions, please see:
<http://www.gnu.org/software/gdb/bugs/>.
Find the GDB manual and other documentation resources online at:
<http://www.gnu.org/software/gdb/documentation/>.
For help, type "help".
Type "apropos word" to search for commands related to "word".
=cmd-param-changed,param="pagination",value="off"
<-- C (threads-6): {"command":"threads","type":"request","seq":6}
1: (7960) <-1014-thread-info
1: (7961) ->1014^done,threads=[{id="1",target-id="Remote target",frame={level="0",addr="0x000368c6",func="main",args=[],file="./main.c",fullname="/home/cas/OpenSource-EBike-firmware/TSDZ2_wireless/firmware/main.c",line="150",arch="armv7e-m"},state="stopped"}],current-thread-id="1"
1: (7961) ->(gdb)
1: (7968) 1014: elapsed time 8
1: (7986) <-1015-stack-list-frames 0 1000
1: (7986) ->1015^done,stack=[frame={level="0",addr="0x000368c6",func="main",file="./main.c",fullname="/home/cas/OpenSource-EBike-firmware/TSDZ2_wireless/firmware/main.c",line="150",arch="armv7e-m"}]
1: (7986) ->(gdb)
1: (7989) 1015: elapsed time 3
1: (7996) Send Event AD7ProcessInfoUpdatedEvent
1: (7997) Send Event AD7ThreadCreateEvent
1: (8021) <--exec-continue
1: (8021) ->^running
1: (8021) ->*running,thread-id="all"
1: (8021) ->~"Note: automatically using hardware breakpoints for read-only addresses.\n"
Note: automatically using hardware breakpoints for read-only addresses.
1: (8023) ->(gdb)
<-- C (threads-7): {"command":"threads","type":"request","seq":7}
1: (8949) ->=breakpoint-modified,bkpt={number="1",type="breakpoint",disp="keep",enabled="y",addr="0x000368b4",func="main",file="./main.c",fullname="/home/cas/OpenSource-EBike-firmware/TSDZ2_wireless/firmware/main.c",line="145",thread-groups=["i1"],times="1",original-location="main.c:145"}
1: (8955) ->~"\n"
1: (8955) ->~"Breakpoint 1, main () at ./main.c:145\n"
1: (8955) ->~"145\t profile_setup();\n"
Breakpoint 1, main () at ./main.c:145
145 profile_setup();
1: (8955) ->*stopped,reason="breakpoint-hit",disp="keep",bkptno="1",frame={addr="0x000368b4",func="main",args=[],file="./main.c",fullname="/home/cas/OpenSource-EBike-firmware/TSDZ2_wireless/firmware/main.c",line="145",arch="armv7e-m"},thread-id="1",stopped-threads="all"
1: (8956) <-1016-stack-list-frames 0 1000
1: (8957) ->1016^done,stack=[frame={level="0",addr="0x000368b4",func="main",file="./main.c",fullname="/home/cas/OpenSource-EBike-firmware/TSDZ2_wireless/firmware/main.c",line="145",arch="armv7e-m"}]
1: (8957) ->(gdb)
1: (8958) 1016: elapsed time 1
1: (8966) Send Event AD7BreakpointEvent
Execute debugger commands using "-exec <command>", for example "-exec info registers" will list registers in use (when GDB is the debugger)
<-- C (threads-8): {"command":"threads","type":"request","seq":8}
<-- C (stackTrace-9): {"command":"stackTrace","arguments":{"threadId":-2,"startFrame":0,"levels":20},"type":"request","seq":9}
1: (9274) <-1017-stack-list-arguments 0 0 0
1: (9275) ->1017^done,stack-args=[frame={level="0",args=[]}]
1: (9276) ->(gdb)
1: (9278) 1017: elapsed time 4
<-- C (stackTrace-10): {"command":"stackTrace","arguments":{"threadId":-2,"startFrame":0,"levels":20},"type":"request","seq":10}
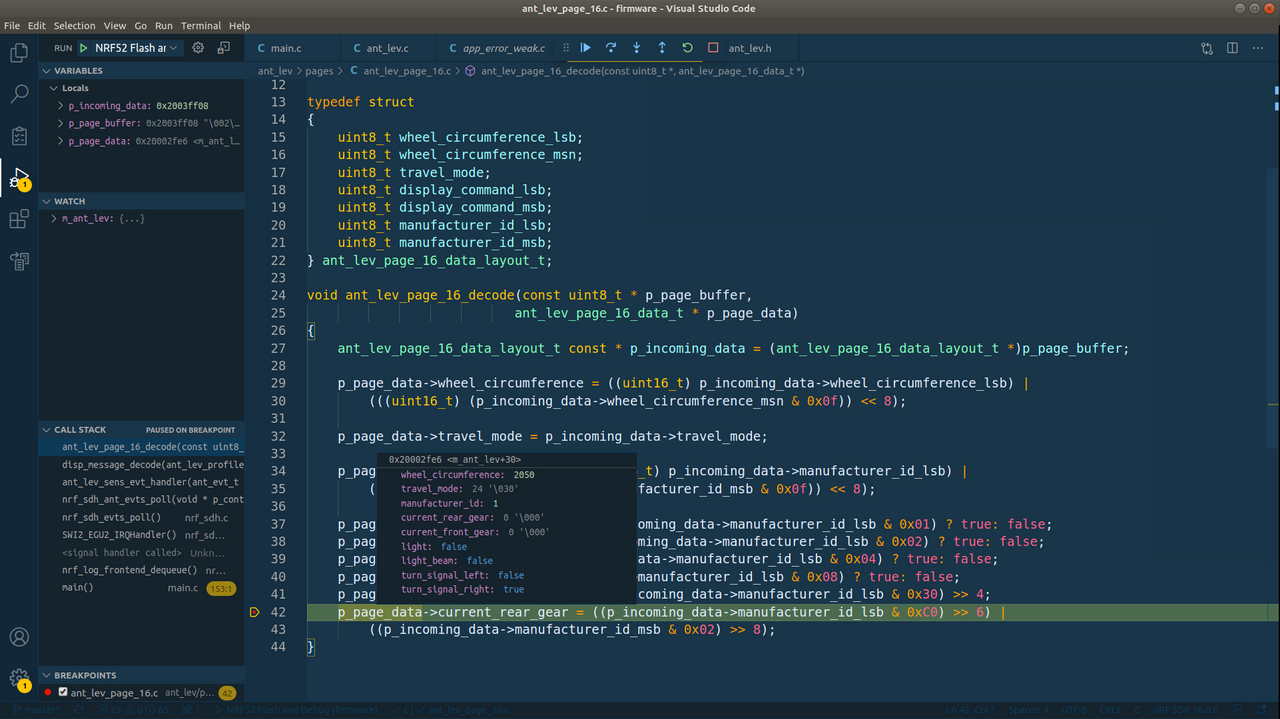
<-- C (evaluate-11): {"command":"evaluate","arguments":{"expression":"m_ant_lev","frameId":1000,"context":"watch"},"type":"request","seq":11}
1: (9586) <-1018-var-create - * "m_ant_lev"
1: (9587) ->1018^done,name="var1",numchild="13",value="{...}",type="ant_lev_profile_t",has_more="0"
1: (9587) ->(gdb)
1: (9587) 1018: elapsed time 0
<-- C (scopes-12): {"command":"scopes","arguments":{"frameId":1000},"type":"request","seq":12}
1: (9939) <-1019-stack-list-variables 0
1: (9940) ->1019^done,variables=[{name="cnt_2"}]
1: (9940) ->(gdb)
1: (9943) 1019: elapsed time 3
1: (9946) <-1020-var-create - * "cnt_2"
1: (9948) ->1020^done,name="var2",numchild="0",value="0",type="uint16_t",has_more="0"
1: (9949) ->(gdb)
1: (9950) 1020: elapsed time 3
<-- C (variables-13): {"command":"variables","arguments":{"variablesReference":1001},"type":"request","seq":13}


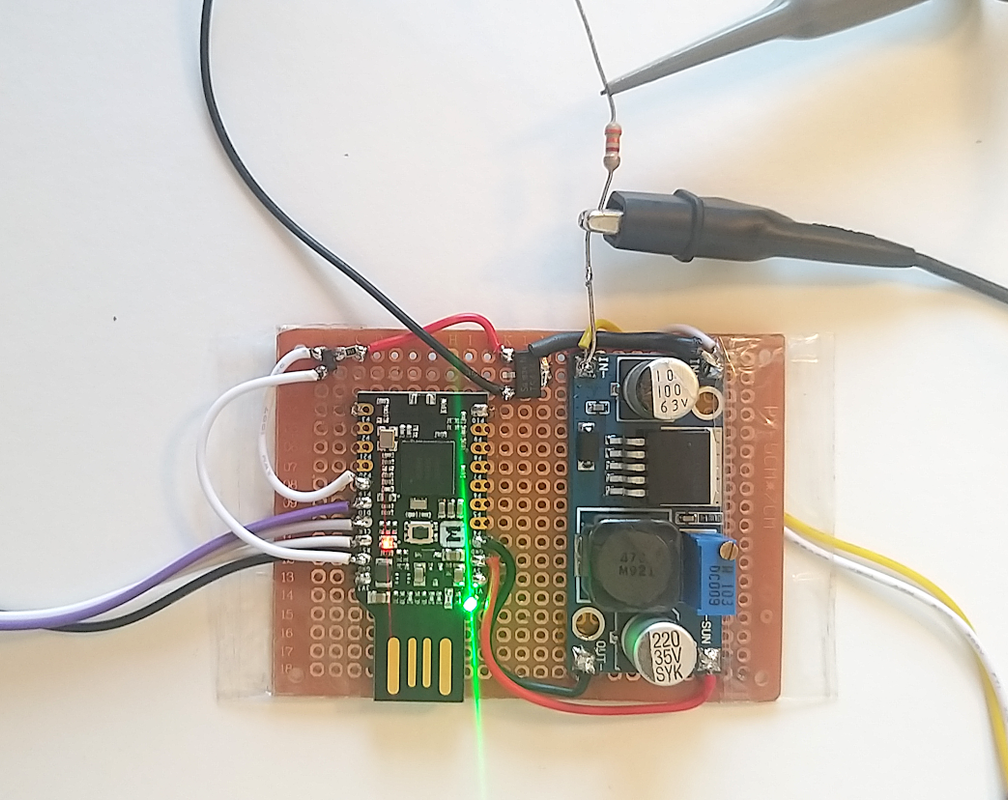

 ) we will still need the direct wired connection to the ST Link ?
) we will still need the direct wired connection to the ST Link ?