raw said:
i think so, had some problem with the dongle disconnecting after 2 seconds but now i think that my dongles firmware is bugged because this also happens on the nrf connect app

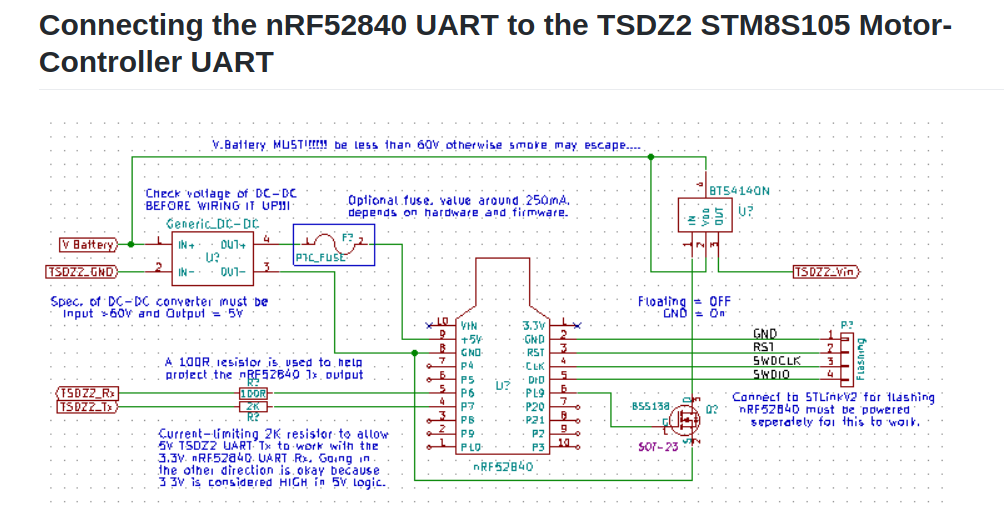
You should use the STLinkV2 and Code Studio, for flash and debug. If you are not on Linux, I guess you will need a bit of work to make it working but then you can document it for the next developers.
raw said:
I don't really understand what you have in mind. do you plan to pass the uart packages to the app and have it act like a real display?
My idea is to send commands forward and backwards, using only UART over Bluetooth - and these commands are JSON strings / files.
Only UART over Bluetooth because it is simple, equal to the communications done already between the TSDZ2, it is already implemented on SW102 firmware, I understand it and there are many examples. I think that must be even easier to find on Flutter. And will also be easier for simulation.
So, wireless board will keep sending the PERIODIC command at every 50ms and the mobile app will keep answering to that command. This command only sends data, no structure at all.
When the mobile app starts up or enters the configuration menu, will send the ASK CONFIGURATIONS structure command. Wireless board will answer with the CONFIGURATIONS structure.
After leaving the configurations menu, the mobile app will send the CONFIGURATIONS data command.
I think we should try to replicate what is already done on the display <-> TSDZ2 controller, but sending commands with JSON. Also the new thing here is the wireless board sending the configurations structure.
Do you agree?