casainho said:Buba, one user told the throttle not working may be something about 0 cadence - this can make sense.
For debug, force motor PWM disable and override the throttle variable with a fixed value -- then do a debug to see where the code is forcing the motor output to zero when throttle > 0.
Will stand back as the same user said it actually does work on the beta 8. Luckily I did not have time to look for the bug so have not invested any time debugging. Waiting for another confirmation from the same user and if it is positive I think the stable 0.19.0 is a GO!
casainho said:I wanted to implement that by myself, I mean, I was not asking for you to implement. But that is ok for sure, no problem. I just hope this goes to next version and not the stable version we are trying to release soon.
Yeah, this should preferably be released in the 0.20.0 so we can finally release the 0.19.0!
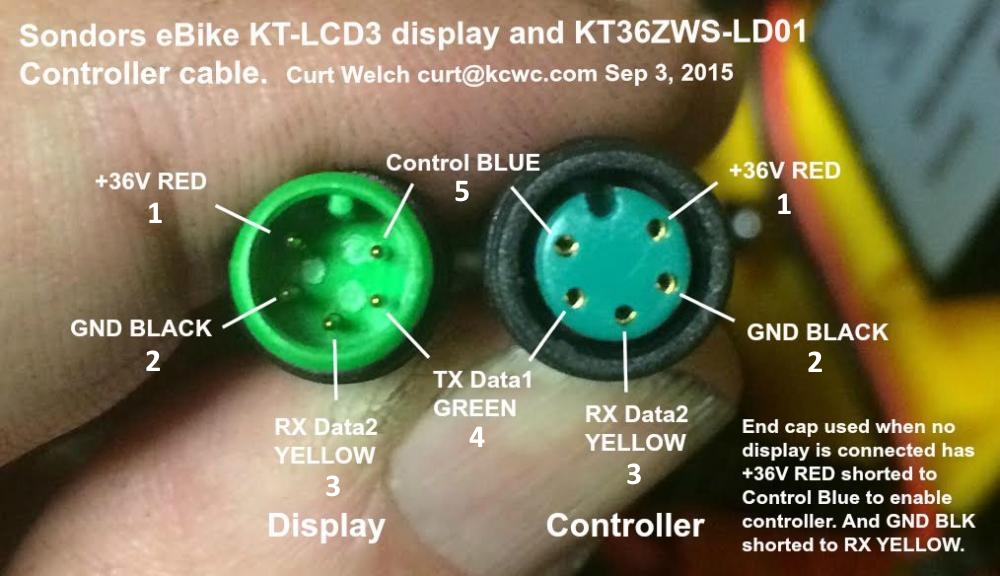
casainho said:One important thing would be to make LCD3 startup even if there is no communications from the motor controller and show an error for that. That error would help the users that exchange by mistake the RX and TX wires as also the ones that keep brakes active without knowing it.
This is tricky in a way that the protection at startup for brake sensors active, for development protection, should be removed, I think. That is a risk we should take, I guess.
Also, do you think to add to LCD3, is there space for that??
I really like SW102 Bluetooth LCD, it seems to have enough memory to hold all this options on the LCD itself, not even counting with the mobile app.
Error codes are great and some issues happen frequently so it would be beneficial to have some code displayed so the user can look up what the problem is.
As I was finishing up the last betas I rewrote some parts on the KT-LCD3 so there is more space now. We can definitely add the enable/disable brake sensor code.
 ( just for reference it was still there in 0.19.0 beta 7, so its something specific to beta 8 that resolved it.)
( just for reference it was still there in 0.19.0 beta 7, so its something specific to beta 8 that resolved it.)