Are any more torque sensor readings of any value?
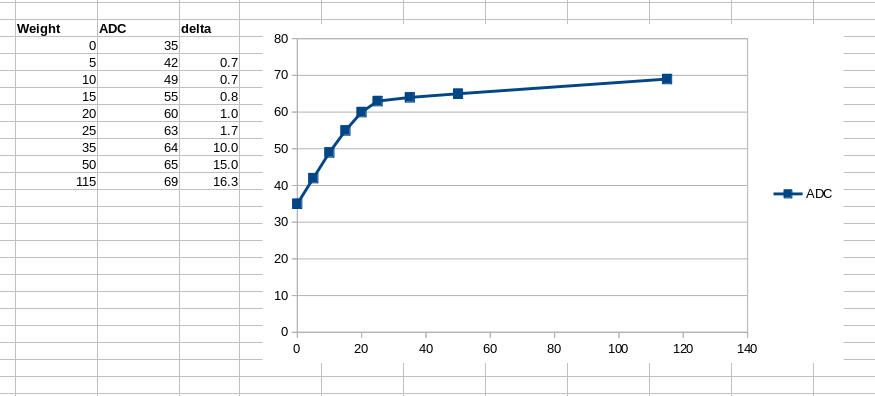
I was experimenting with the sensor measurements yesterday. The bike read 38 resting, but after a short ride it read 36 (resting). The max reading with me putting all weight (99.5 kilo) was 72 (on relatively flat ground). Firmware 18.2 on LCD 3.
I'll get some luggage scales or something and test if more samples are needed.
I'd planned to upgrade to the 850C, but I have to get a new soldering iron and some wick to clean up my first attempt
I was experimenting with the sensor measurements yesterday. The bike read 38 resting, but after a short ride it read 36 (resting). The max reading with me putting all weight (99.5 kilo) was 72 (on relatively flat ground). Firmware 18.2 on LCD 3.
I'll get some luggage scales or something and test if more samples are needed.
I'd planned to upgrade to the 850C, but I have to get a new soldering iron and some wick to clean up my first attempt