buba said:
And may I ask how large the average difference is between the right and left pedals when comparing on several bikes? Is there an absolute need to calibrate both sides and have the user always start with the pedals in a certain position? I am thinking that maybe the majority has "good enough" values between the both sides so we can average the value. This would make the calibration and use of the system much easier. But I am just asking.
You have already potentially increased the range up to four times just by calibrating the torque sensor. So maybe a "double" calibration on both sides is not necessary and would have diminishing return for most users?
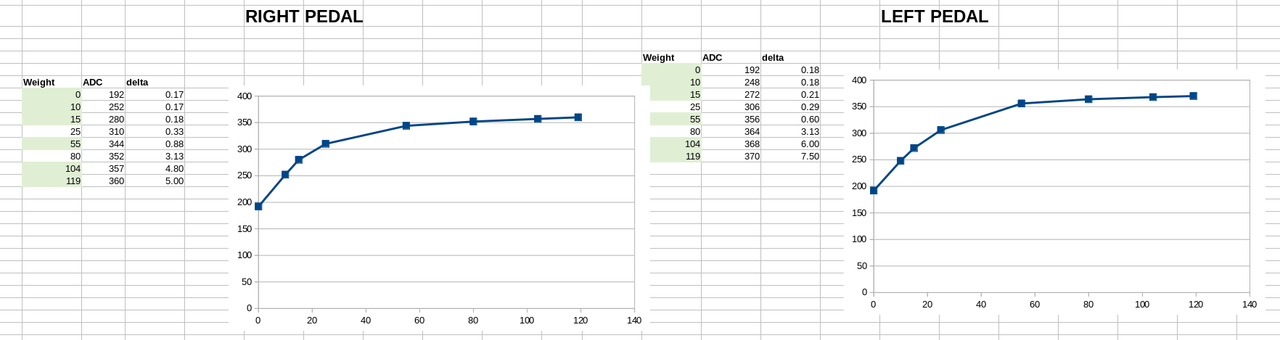
If I use the same values, here an example when I put my self on the right or left pedal:
- right pedal measures correctly: 105 kgs
- left pedal measures incorrectly: 65 kgs
That is an error of 40 kgs / 38%, that is to much.
So yes, there is need for calibration of left and right pedals, as also user need to power up the motor with one of the pedals positioned in direction to ground. On SW102/850C we can display a quick message at power up saying for user removed the feet from the pedal and keep one in direction to the ground because is it needed for automatic torque sensor calibration.
I don't have a better idea but here we are clearly adding very advanced features to this motor, fine calibration of the torque sensor as also "calibration" of the emtb curve.
Maybe we could keep this features disabled as default and keep the firmware running as it is on v0.19.0 on this case. When enabling this features, user would need to validate and possible do own calibration.
I think the users with SW102 and Strava integration will want the torque sensor well calibrated since the pedal human power will be sent to Strava.
Also I hope it will be easy to manage the configurations on a mobile app when using the SW102. At least I hope user will be able to save them as a backup and apply them to other TSDZ2 ebikes.

")