casainho
10 GW
- Joined
- Feb 14, 2011
- Messages
- 6,058
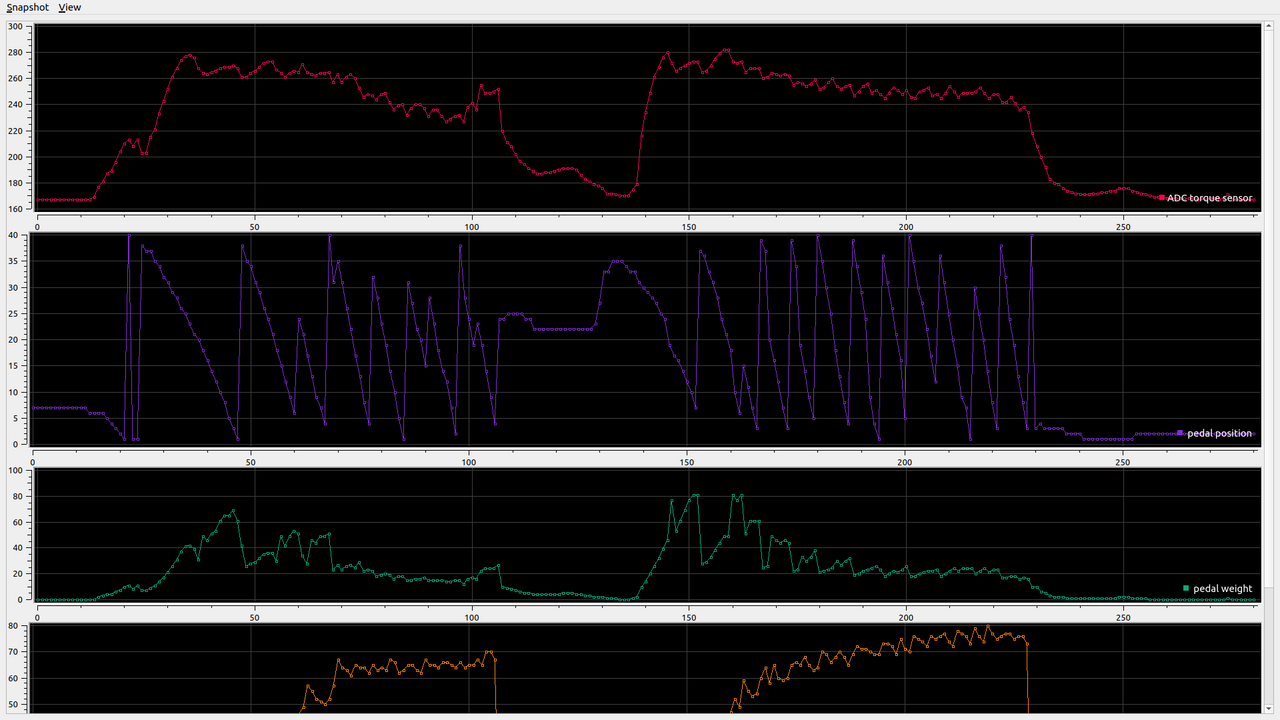
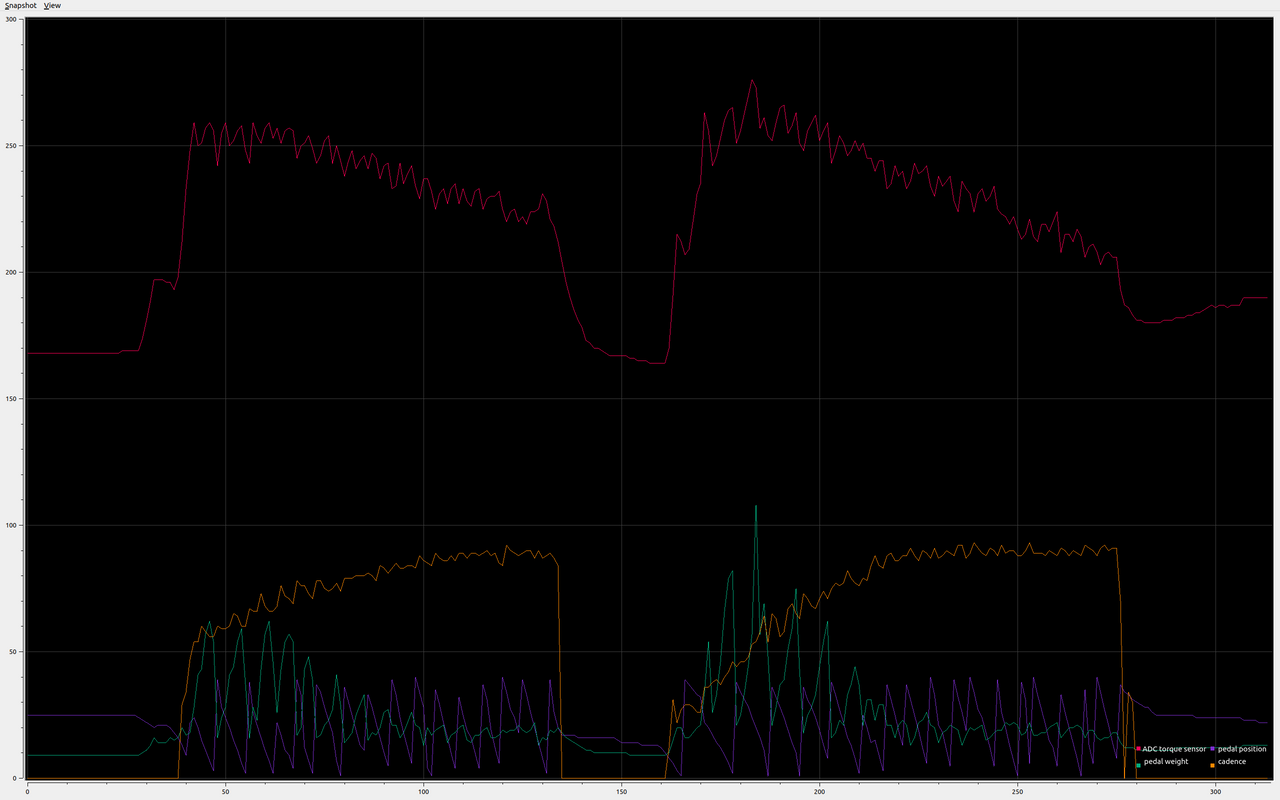
agphil said:Are you sure that the cadence is not the 4th graph and the weight the 3rd one?
Thanks!! You were right and here another log now with correct variables labels.
What I see clearly wrong are peaks of calculated weight on the pedals. This peaks are way more than the values regarded to the ADC, I mean, the ADC value is the input to the calculation and the weight the output, and this output is clearly over what should be, so, I will look at the code to try find the issue. This error peaks are bigger at low cadence and reduce to almost zero at higher cadence like 80 and 90 RPM.

Thanks!! That would be nice for me to use right now but I tested and It could not connect. Many Android apps can not connect because SW102 is Bluetooth Low Energy - I tested many and I found only 2 that can connect.bikelpl said:You can use app named "Arduino Centrale Free" it is universal serial plotter.
It can show up to 10 values on one graph in different colors.
It can also log received data as CSV.

")