I used this information:
https://www.engineeringtoolbox.com/torque-wrench-luggage-scale-d_1909.html
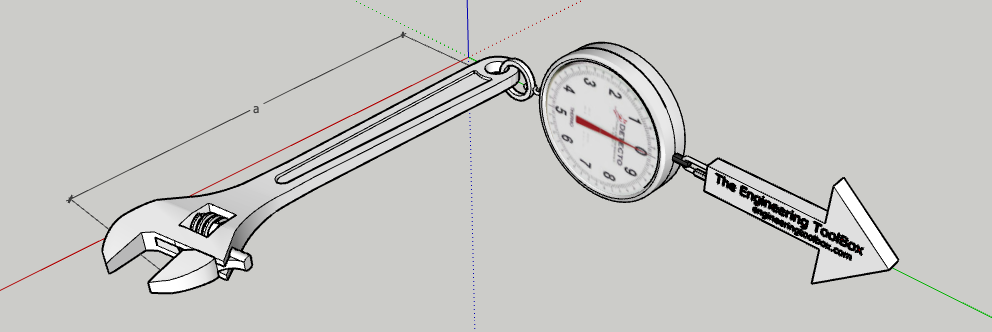
Improvised torque wrench with luggage scale
If you don't have a torque wrench available - or if you want to check the readings of the one you have - it is easy to improvise by using a standard wrench and a scale as indicated in the figure above.
The moment - or torque - can be calculated
T = F a (1)
where
T = moment or torque (Nm, ft lbf )
F = applied force (N, lbf)
a = length of the wrench (m, ft)
Note! - Most scales in the SI unit system measures weight - force due to the acceleration of gravity - in kg.
the difference between mass and weight.
The reading from the scale can be converted to N by using
F = m g
where
m = reading of the scale (kg, lbf)
g = acceleration of gravity (9.81 m/s2, 32.17 ft/s2)
Example - Measuring Torque with a standard Wrench and a Luggage Scale - readings in kg
The reading of the scale at the end of the wrench is 10 kg. The length of the wrench is 0.3 m. The moment exerted can be calculated
T = (10 kg) (9.81 m/s2) (0.3 m)
= 29.4 Nm
Example - Measuring Torque with a standard Wrench and a Luggage Scale - readings in lb
The reading of the scale at the end of the wrench is 20 lbf. The length of the wrench is 6 in. The moment exerted can be calculated
T = (20 lbf) (6 in)
= 120 lbf in
= 10 lbf ft
----
Once you are familiar with the torque at different revolutions per minute (rpm’s) the power is easy to calculate. The formula for power calculation is:
P = τ x n x 2 x pi
τ = Torque
n = roations/ second
pi = 3,14

")
