Futterama
1 kW
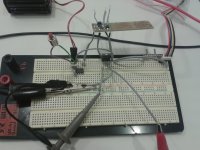
So, I got my Rigol DS1104Z scope (4ch, 100MHz, 1GSa/s) recently, and made room for it on my desktop. So now I'll really start building my RC controller using Lebowski's controller IC.
My aim is to build a RC controller for a SkyRC Beast X528 RC car motor. The motor and controller is going to be used in my 4WD 1:5 scale RC race car. This is not an EV build :wink:
The motor: http://www.skyrc.com/index.php?route=product/product&path=39_48&product_id=141
The controller specs:
- Input voltage: 10S LiPo, 37V nominal, 42V max.
- Current capability: 200A "continuous" current or just a few seconds peak, but enough to run the motor on a track.
- FETs: TO-220 type, 75V or above. Not sure which manufacturer or model yet, but I have a few in mind.
- Bootstrapping FET drivers from TI for testing the first prototype.
- Isolated gate drivers with miller clamp and desat detection for the final version.
- Lebowski controller IC, TQFP SMD type.
- Lebowski style "low inductance output stage".
- Cooling: Modified CPU cooler heatsink and fan.
- Opto input from the RC receiver, no BEC, the receiver and servos will run from a seperate 7.4V LiPo battery.
- Gadget feature ideas (I just love those): WiFi connection to smartphone with various readings (ESC/motor temperature, battery voltage/current, maybe even a battery gauge, max motor RPM) through a webpage using WebSocket for instant data exchange. I'm also planning full access to the Lebowski chip menu from smartphone.
The above features has been updated to reflect my design changes along the way.
My aim is to build a RC controller for a SkyRC Beast X528 RC car motor. The motor and controller is going to be used in my 4WD 1:5 scale RC race car. This is not an EV build :wink:
The motor: http://www.skyrc.com/index.php?route=product/product&path=39_48&product_id=141
The controller specs:
- Input voltage: 10S LiPo, 37V nominal, 42V max.
- Current capability: 200A "continuous" current or just a few seconds peak, but enough to run the motor on a track.
- FETs: TO-220 type, 75V or above. Not sure which manufacturer or model yet, but I have a few in mind.
- Bootstrapping FET drivers from TI for testing the first prototype.
- Isolated gate drivers with miller clamp and desat detection for the final version.
- Lebowski controller IC, TQFP SMD type.
- Lebowski style "low inductance output stage".
- Cooling: Modified CPU cooler heatsink and fan.
- Opto input from the RC receiver, no BEC, the receiver and servos will run from a seperate 7.4V LiPo battery.
- Gadget feature ideas (I just love those): WiFi connection to smartphone with various readings (ESC/motor temperature, battery voltage/current, maybe even a battery gauge, max motor RPM) through a webpage using WebSocket for instant data exchange. I'm also planning full access to the Lebowski chip menu from smartphone.
The above features has been updated to reflect my design changes along the way.