
Yes walk assist is open loop here a part of code:
View attachment code.c
View attachment code.c
casainho said:I understand that using original LCD and marcoq fork is a quick and cheap way to have TSDZ2 running with our flexible OpenSource firmware, but the full potential of our firmware can only be realized when using KT-LCD3 or the Bafang 850C color LCD(when the firmware is finished), because some advanced features depends heavily from that LCDs, they can't simple work using the original LCD.
It is very hard to develop features and keep always thinking in the two very different possibilities: LCD running our OpenSource firmware AND original LCD. Because having the project with all that possibilities would compromise the quality (more risks for bugs, more complex project, more hardware to test, etc) and because my resources are very limited, I prefer to keep the project as it is right now -- it works very well only on LCDs that runs our OpenSource firmware.
")
I think you can leave the wires unconnected. I will put this note on the wiki.Ron Paul's Blimp said:When wiring up the KT-LCD3, if you're not using brake sensors, what do you do with the brake wire from the controller? Leave it unconnected? Or tie it to P+ (green on 6 pin, blue on 8 pin)?
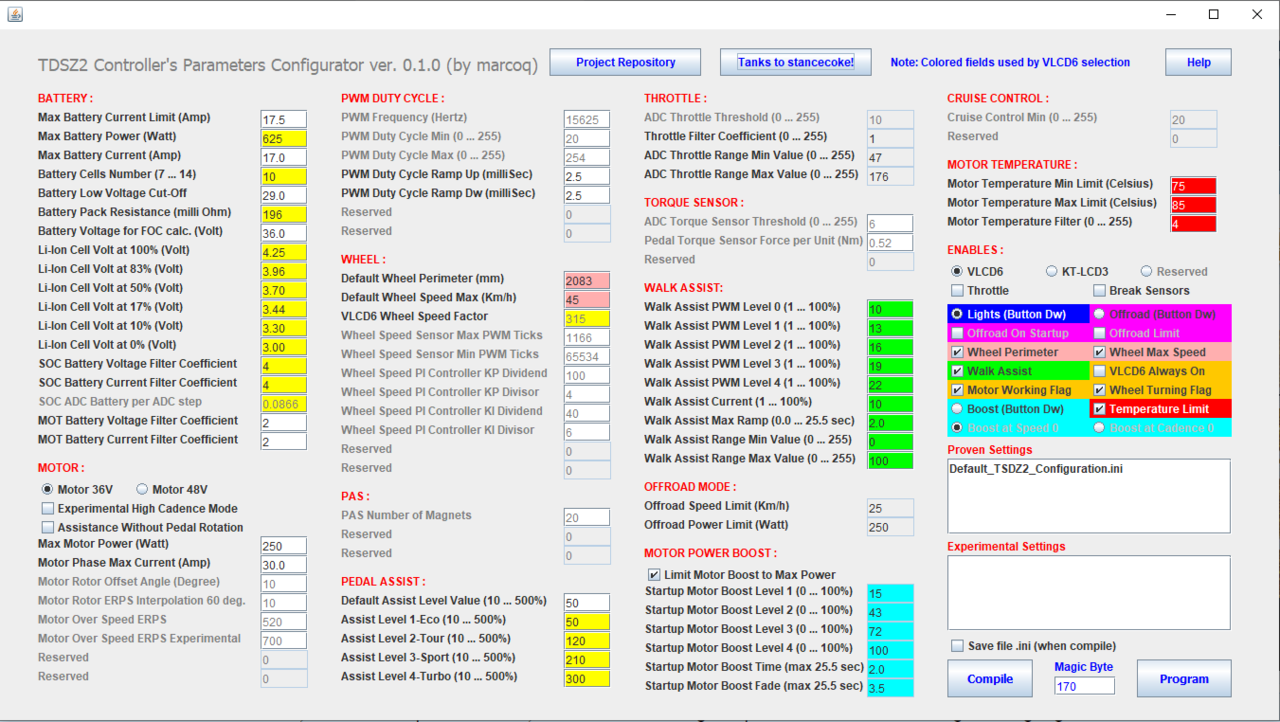
marcoq said:I have released the new version of the Controller firmware compatible with both the VLCD6 and KT-LCD3 diplay. I have also released the Java configuration interface (TSDZ2 Configurator ver. 0.1.0).
Have a good day.
https://github.com/qmarco/TSDZ2-Smart-EBike-compatible-with-original-VlCD6-display/blob/master/README.md
marcoq said:I have released the new version of the Controller firmware compatible with both the VLCD6 and KT-LCD3 diplay. I have also released the Java configuration interface (TSDZ2 Configurator ver. 0.1.0).
stancecoke said:marcoq said:I have released the new version of the Controller firmware compatible with both the VLCD6 and KT-LCD3 diplay. I have also released the Java configuration interface (TSDZ2 Configurator ver. 0.1.0).
Great work!
But please don't send tanks to me, as I am a pacifist
regards
stancecoke
marcoq said:My project was born thanks to your "template"!!!
I see the experimental high cadence mode, does it work with the 48V motor and LCD6?stancecoke said:marcoq said:I have released the new version of the Controller firmware compatible with both the VLCD6 and KT-LCD3 diplay. I have also released the Java configuration interface (TSDZ2 Configurator ver. 0.1.0).
Great work!
But please don't send tanks to me, as I am a pacifist
regards
stancecoke
I will introduce myself before going further. My name is ZZZZZ and I have a small shop in ZZZZZ where I transform "normal" bikes into electric bikes. My goal is to make people happy, get more people on bikes, help old and disabled persons to be able to ride bicycles and improve the environment. Of course, as it is my job I try to earn enough money to feed my family also.
I hardly sell parts, my business is really to "create" systems adapted to the needs of my clients and build it on their bikes.
(...)
My goal is to have an EU legal version (as I risk 5 years of prison and €11000 fine if my shop sells "illegal bikes") that I can setup for my clients needs and build on their bikes.
Clients shouldn't have easy access to advanced settings for before mentioned legal reasons.
Ron Paul's Blimp said:Can I play devil's advocate? I think it might be really good for the overall project to include support for the OEM displays. I think there are probably a lot of people who would love to experiment with the firmware but are turned away by the need for a bunch of soldering and figuring out what donor cables to buy and all of that.
Supporting the OEM displays significantly lowers the barrier to entry -- no need to purchase a new display from China, no need to open any components, less soldering and much less confusing install process.
Then, once people have experimented using the OEM display they already have, the people who want more advanced display features will have an easier next step to trying one of the opensource displays. They already have their feet wet, it's less daunting to make an incremental step to the next thing.
One could imagine someone selling some products to make this easier (maybe a nice way for casainho to be rewarded for his efforts if he were interested in doing it):
1. Sell a programming cable (like Luna sells for Bafang). Paired with marcoq's eeprom configuration UI, this is everything the novice user would need to get started. They buy a single thing for $20 - $30, download hex files and the config tool, and they're up and running.
2. Sell 850C displays with the proper connector already in place and a stable version of the firmware already flashed for users who want to take the next step. They've already been able to try the firmware using their OEM displays, so they're already 'hooked' and it's an easier decision.
casainho said:I understand that using original LCD and marcoq fork is a quick and cheap way to have TSDZ2 running with our flexible OpenSource firmware, but the full potential of our firmware can only be realized when using KT-LCD3 or the Bafang 850C color LCD(when the firmware is finished), because some advanced features depends heavily from that LCDs, they can't simple work using the original LCD.
Can you talk a little about those advanced features? It seems like, in terms of configuration, we can just move the advanced configuration to be done at flashing time instead of configured on the display, using marcoq's UI. This is what people already do with the bafang mid-drives. In terms of display (the nice graphs and such you're making for the 850C), well obviously the OEM display can't show those -- but neither can the KT-LCD3, and neither could the KT-LCD5, if we ported your firmware to that.
It is very hard to develop features and keep always thinking in the two very different possibilities: LCD running our OpenSource firmware AND original LCD. Because having the project with all that possibilities would compromise the quality (more risks for bugs, more complex project, more hardware to test, etc) and because my resources are very limited, I prefer to keep the project as it is right now -- it works very well only on LCDs that runs our OpenSource firmware.
I might be misunderstanding or oversimplifying, but after reading the diffs between marcoq's tree and yours, it didn't seem so bad to me? If you want to add a new configuration variable to your opensource displays, we just need to add it to the new config tool for the OEM displays. You personally could probably just do nothing. You release version N of your firmware that uses a new variable, and people using OEM display will make the needed changes to the config tool because they'll know they can't use version N with OEM displays until they do that.
If you want to send a new variable from the controller to the opensource displays to show something fancy, well, we just literally do nothing for OEM (i.e., don't change the OEM serialization function). People using OEM displays miss out. Maybe it encourages them to want to buy an 850C from you.
In other words, it seems like the only main places of code divergence are: 1. adding uart serialization / deserialization functions for OEM displays (marcoq already did this), 2. adding a simple abstraction layer to the config variables (so they can come from either eeprom or the display), and 3. adding a tool to write config vars to eeprom. #1 will never change since the OEM display firmware won't change. #2 should be very low-touch. #3 will need updating, but you don't need to do it personally. That tool can live in marcoq's tree even (or someone else's if he doesn't want to maintain it).
casainho said:I am not against OEMs, business or laws, but protecting the environment is a higher objective, above all!!
So, my focus will continue to be developing and share knowledge and technology (as OpenSource) for final users as me and that seems to go kind of against the manufactures/OEMs/sellers. I want to put my very limited resources only on a path that will provide final users with flexibility, even if that means not the most quick and cheap solutions.
To resume: I want to only focus my energy on developing firmware for TSDZ2 + LCDs that let final users have all the freedom and advanced features (contrary to the needs of manufactures/OEMs/sellers that are asking for cheap and quick solutions and that lock out the final users).
casainho said:v0.17.0-beta5 is available here, please test and give feedback:
https://github.com/OpenSource-EBike-firmware/TSDZ2-Smart-EBike/releases/tag/v0.17.0-beta5
Changes:
- implemented automatic fast increase/decrease of variables on configuration menus
- settable odometer
- trip distance function
- imperial units throughout the system
- saved menu state for all menus when power down
- flashing time on menu number and variables is now short -- it is easier to see the values
- TM and TTM time measurement
This beta release of firmware for KT-LCD3 works with the same previous TSDZ2 v0.16.0 firmware version:
- TSDZ2-throttle-v0.16.0.hex
- TSDZ2-v0.16.0.hex
If only the gearing was not so noisy.
elem said:If only the gearing was not so noisy.
yes ! metal gear ... i don t like it .
will be back to nylon gear as open source firmware better for preserving nylon gear .
Was a long time i haven t used used metal gear, i can t ride whith this noise
Same with me, even my throttle connection is used to the temperature sensor.elem said:i don t use throttle, i hope for a wonderfull " walk assist " ...
Sometimes it s necessary to use walk assist in mountain climbing .
With stock firmware walk assist worked, but it was a " poor " walk assist, not really usefull,
i dream for a "walk assit " more powerfull and usefull .
casainho said:Same with me, even my throttle connection is used to the temperature sensor.elem said:i don t use throttle, i hope for a wonderfull " walk assist " ...
Sometimes it s necessary to use walk assist in mountain climbing .
With stock firmware walk assist worked, but it was a " poor " walk assist, not really usefull,
i dream for a "walk assit " more powerfull and usefull .
But sometimes I need a throttle when something broke on pedals/transmission/etc so I would like to implement virtual throttle, maybe a bit like what we need for a good walk assist where user can quick increase/decrease the wheel speedat values like 3km/h up to 6km/h. Power must also be configured.



I remember to see your videos with TSDZ2 on mountains when I found the first information about this motor. It is really nice to see that 1 year after, your preference goes to the firmware I started to it!! Who knows what will happen when we share something with others??elem said:Riding south french mountain, first ride with open source running .
[youtube]-BAI97_nvGk[/youtube]
marcoq said:marcoq said:I have released the new version of the Controller firmware compatible with both the VLCD6 and KT-LCD3 diplay. I have also released the Java configuration interface (TSDZ2 Configurator ver. 0.1.0).
Have a good day.
https://github.com/qmarco/TSDZ2-Smart-EBike-compatible-with-original-VlCD6-display/blob/master/README.md
Excuse me .... this is the right link: https://github.com/qmarco/TSDZ2-Smart-EBike-compatible-with-original-VlCD6-display