Nfer said:
casainho said:
2. What means start assist of 20%? 20% of what??
There are feedback from users of cargo bikes that like the BOOST at startup.
I was thinking in maybe remove BOOST since other users/developers say it is not needed anymore if using torque mode instead of power mode. I would prefer to not add new features and even ones that maybe be similar, hard to understand the difference from others.
With the 20% I am trying to say that this function needs an initial power value a 0.000001s to achieve the goal.
Hmmm, I still do not understand what 20% refers to. If I did understand correctly, the amount of power assistance is always the same which I don't like - I started to implement BOOST as a fixed power value but in the end it was awkward because if I was with a low assist level riding like on a shared bike path with low gears, I wanted a small BOOST but on other occasions like stop on red lights I wanted a strong BOOST. In the end, the amount of BOOST is configured for each assist level and is also an amplification of the power or torque done on the pedals, meaning that users still have real time control on the amount of BOOST.
Nfer said:
The problem I experience with the torque mode is that I don't have the legs to increase the speed only with torque from standstill.
For me, it doesn't make sense to carry a battery of 696wh and a 750W motor and feel that I have stand up on the pedals every red light because the system doesn't deliver any power when I need the most, but I have to push against the motor drag and carry the extra weight.
In NYC there is a red light at every other block and I am not going to put my life at risk as other people running red lights to keep the momentum.
Well, the BOOST is exactly to improve the situation you refer!! Is to take advantage of ebikes motors compared to a regular bicycle, to decrease the disadvantage the bicycle have related to motor cycles and cars on that situation. Also, after the last discussion of street legal mode, where what makes sense is to limit motor continuous power but permit short bursts of motor power at startup, BOOST must be implemented.
I should note that my main motivation developing OpenSource knowledge and technology for ebikes is because I want to have a greener world with less cars (even if the cars are electric, I own one electric car since 7 years ago) and so I want the ebikes to be the best possible for commuting.
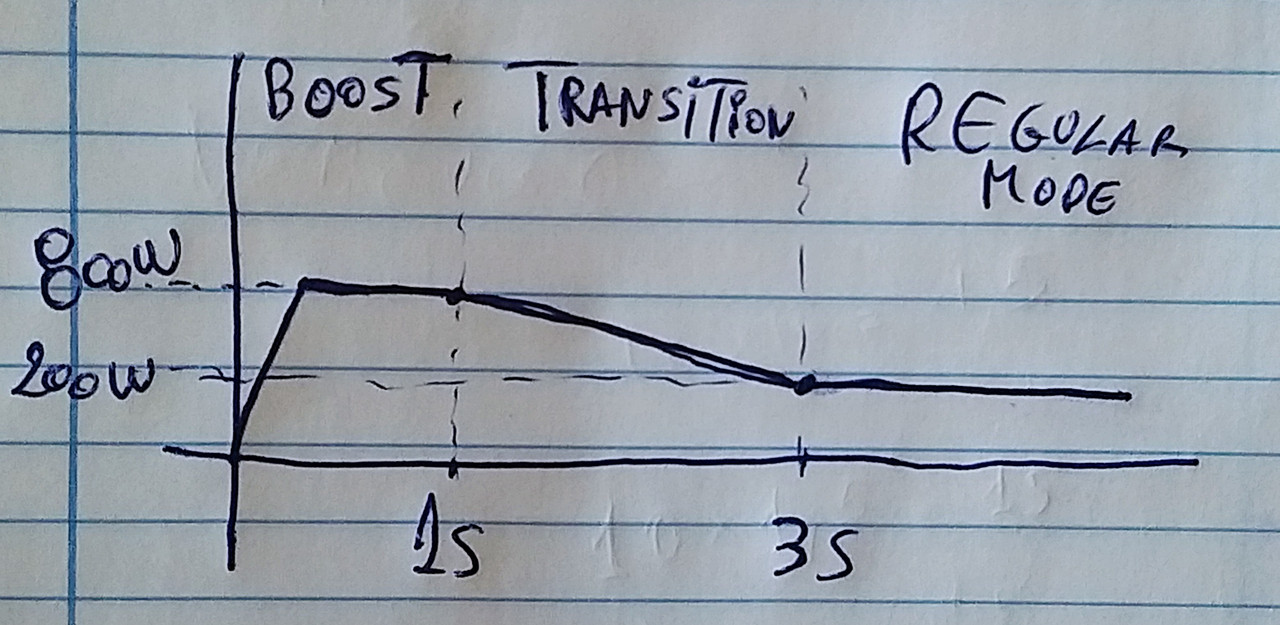
I think I will remake the BOOST feature. Currently BOOST works like this:
1. user configures an amount of time BOOST will be active, let's say 1 second
2. user configures an assist level factor for BOOST (this should be higher than regular assist level)
3. user configures if BOOST happens only when start pedaling and wheel speed is zero or if always when start pedaling
4. user configures an amount of time for transition from BOOST to regular mode, let's say 2 seconds
What I think it is hard to understand is 2. but I think I will improve it to be a factor from regular assist level. Let's say 3.0, would mean that BOOST would amplify by 300% the motor assistance compared to not having BOOST feature enable.

")