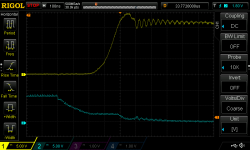
Njay, thanks for commenting. You are right, the switching time must be from the MOSFET starts to turn off, till it is finished, not from when the gate driver IC wants it to turn off.
So I have a big delay/latency compared to the actual switching time due to the "high" gate drive voltage. I can lower this voltage but it will increase RdsON and also increase the turn-on time. But maybe 12V is not optimal, maybe it doesn't provide the best balance between turn-on/off times and RdsON that makes the controller most efficient (lowest losses).
As far as I know, the deadtime has a big impact on the efficiency, as you just said, the body diode is conducting during this time and it will dissipate a lot of heat, probably a lot more than what a little higher RdsON will dissipate.
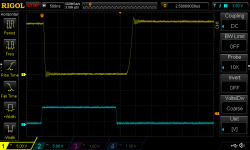
For some reason I would like to see identical turn-on and turn-off delay/switching times, but is there any reason for this, other than it looks nice on the scope?
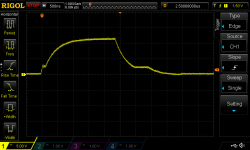
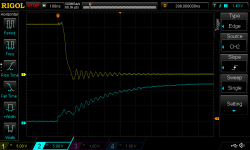
Regarding Vbat, yes I noticed that, and was also thinking I would take a look at the waveform after turn-off but didn't get to it before I forgot about it again.
I have 2x1000µF aluminium caps, but they are just the best I had, the ripple current is not very high, some 1.7A with 42mΩ impedance, 25V. I'll get better caps when I order components again but now that I look at my notes about caps, the ones I had my eye on, are 50V, 2200µF, 3.7A ripple, 20mΩ ESR and I was planning to use only one of them:
http://www.digikey.dk/product-detail/en/EGPA500ELL222ML40S/565-3401-ND/3528551
But still, I don't know how much current I put out, the current sensors are one of the things I need to include in my order :lol: